2PC in TLA+, step 1
2PC广泛运用于各种分布式系统,然而就是这样一个看似平平无奇的算法,想要正确实现,绝不是一件容易的事情。这个系列应该会陆续写三篇,第一篇主要会在TLA+中描述一个简单的2PC算法。
Two-phase-commit
我们沿用经典论文Consensus on Transaction Commit里的描述。一个事务有两种类型的参与者:
- Resource Manager: 下面简称RM,负责实际执行事务,所有RM必须就事务是committed或者aborted达成共识。
- Transaction Manager: 下面简称TM,负责推动并决策事务commit或者abort。
然后简单描述下2PC流程,TM给所有RM发送prepare消息,当TM确定所有RM都成功转换成prepared状态后,TM就向所有RM发送commit消息,所有RM收到commit决议后就会进入committed状态。如果TM发现不是所有RM都成功转换成prepared状态,TM则会决定abort事务,向所有RM发送abort消息,所有RM收到abort决议后就会进入aborted状态。
上述流程没有详细说corner case的处理,我们会直接在动手实践中会发现并尝试解决这些case。
TLA+ specification
Models
variable
rmState = [rm \in RM |-> "working"],
\* RM收到的消息队列 FIFO
rmMsg = [rm \in RM |-> <<>>],
tmState = [state |-> "init"];
为了实现以及避免状态空间爆炸,我们的specification大致模型如下:
- RM的状态包括5种
{"working", "prepared", "committed", "aborted", "unavailable"}(本文中都不会用unavailable状态)。每个RM只能查看或者修改自身的状态,而不能查看或者修改其他RM的状态。 - 每个RM有一个FIFO消息队列用于接收TM发送的消息。
- TM的状态包括4种
{"init", "commit", "abort", "unavailable"}(本文中都不会用unavailable状态)。 - TM会通过每个RM的消息队列发送对应指令,TM可以查看任意RM的状态(但不能修改),并根据RM的状态可能会修改自身状态。
Definitions
定义一些operator方便后续使用
define {
canCommit == \A rm \in RM : rmState[rm] \in {"prepared"}
canAbort == \E rm \in RM : rmState[rm] \in {"aborted"}
}
- canCommit: 判断一个事务能否commit的条件就是所有RM都处于prepared状态。
- canAbort: 判断一个事务是否需要abort的条件就是存在RM处于aborted状态。
其实TM判断是否需要abort还有其他情况,比如RM因为某种原因无法prepared(比如锁冲突、RM挂掉等),本文中暂时不涉及,后面两篇会逐渐完善。
Invariants
Consistency ==
\A rm1, rm2 \in RM : ~ /\ rmState[rm1] = "aborted"
/\ rmState[rm2] = "committed"
TypeOK ==
/\ rmState \in [RM -> {"working", "prepared", "committed", "aborted", "unavailable"}]
/\ tmState["state"] \in {"init", "commit", "abort", "unavailable"}
Completed == <> (\A rm \in RM : rmState[rm] \in {"committed","aborted"})
两个Invariants:
- Consistency: 所有RM对于事务的最终状态必须达成共识,要么是
committed,要么是aborted。 - TypeOK: 用来检查rmState和tmState都是合法值。
一个Temporal Property:
- Completed: 注意有个
<>代表eventual,也就是所有RM的状态都变成了committed或者aborted。
RM
到这里可以开始实现RM和TM的逻辑了,我们先看RM的状态转换图
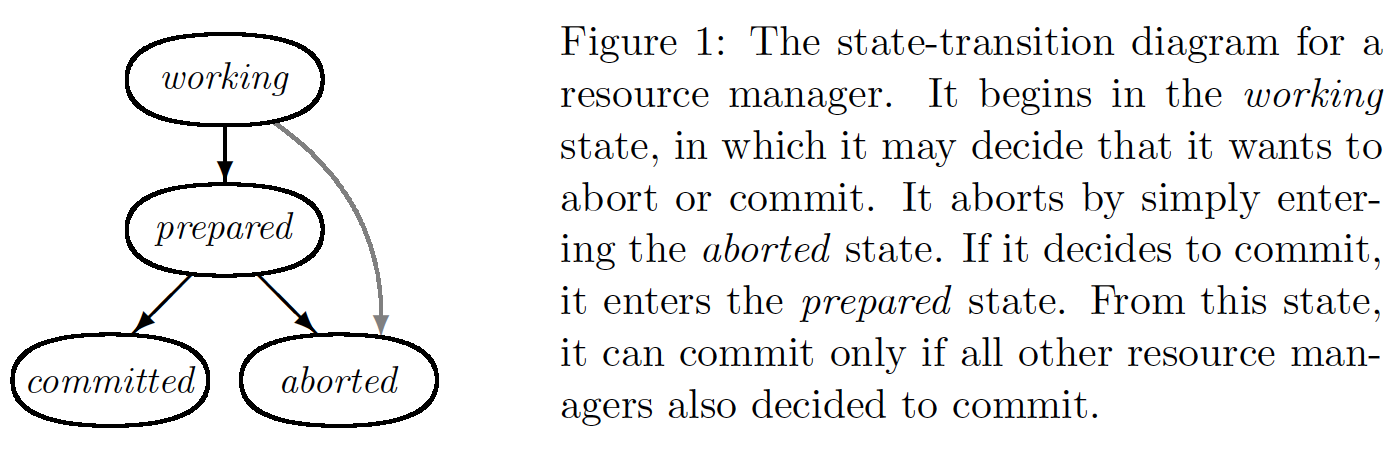
- working → prepared: 收到了TM发送的preapre消息
- prepared → committed: 收到了TM发送的commit消息
- prepared → aborted 和 working → aborted: 收到了TM发送的abort消息
根据上面的状态转换,我们开始实现RM,最外层的while循环用来推动RM状态机,当rmState[self]变为committed或者aborted就代表这个事务结束了。
由于有多个RM,所以用rmState[self]代表自身这个RM的状态
fair process (RManager \in RM)
variables msg = <<>>;
{
RM_MAIN:
while (rmState[self] \notin {"committed", "aborted"}) {
recv(msg);
if (rmState[self] = "working" /\ msg.type = "prepare") {
rmState[self] := "prepared";
} else if (rmState[self] = "prepared" /\ msg.type = "commit") {
rmState[self] := "committed";
} else if ((rmState[self] = "working" \/
(rmState[self] = "prepared" /\ tmState["state"] = "abort"))
/\ msg.type = "abort") {
rmState[self] := "aborted";
} else {
assert FALSE;
}
}
}
然后RM就不断从消息队列开始接收消息,每次收到一个消息之后就将其从队列中移除。(事实上为了简单,不将其从队列中移除也是可以的,一个好处是减少状态搜索空间,另一个是这甚至能模拟网络问题导致消息重发- -b)
macro recv(msg) {
await Len(rmMsg[self]) > 0;
msg := Head(rmMsg[self]);
rmMsg[self] := Tail(rmMsg[self]);
}
然后根据自身状态和收到的消息类型,依据上面的状态转换图开始转换。最后加的assert FALSE是为了确保不存在其他的状态转换路径和非法消息。
TM
一个事务只有一个TM,TM做的事情就是给RM发送消息以推动事务。
fair process (TManager = 0)
variables idx = 1;
{
TM_PREPARE:
call broadcast([type |-> "prepare"]);
TM_DECIDE:
either {
await canCommit;
tmState["state"] := "commit";
call broadcast([type |-> "commit"]);
} or {
await canAbort;
tmState["state"] := "abort";
call broadcast([type |-> "abort"]);
}
}
首先就是给所有RM发送prepare消息,然后开始根据RM的状态决定事务是commit还是abort,通过await canCommit和await canAbort等待RM的条件满足commit或者abort之后。当满足条件后,TM修改事务的状态,并给所有RM发送消息,最后当RM收到消息后会将自身状态修改为committed或者aborted。
事实上在上面这个TM实现上,是不会abort事务的,主要是因为canAbort只有当存在RM处于aborted状态时才会为真,而只有TM发送abort消息才会使RM转换为aborted状态。我们会在后面几篇中激活这个路径。
给所有RM发送消息的实现如下,需要使用procedure是因为macro里面不能包含while循环,只有procedure可以。发送消息本身就是往对应RM的消息队列中添加一个消息。
macro send(dst, msg) {
rmMsg[dst] := Append(rmMsg[dst], msg);
}
procedure broadcast(message) {
TM_B1:
idx := 1;
TM_B2:
while (idx <= Cardinality(RM)) {
send(idx, message);
idx := idx + 1;
};
return;
}
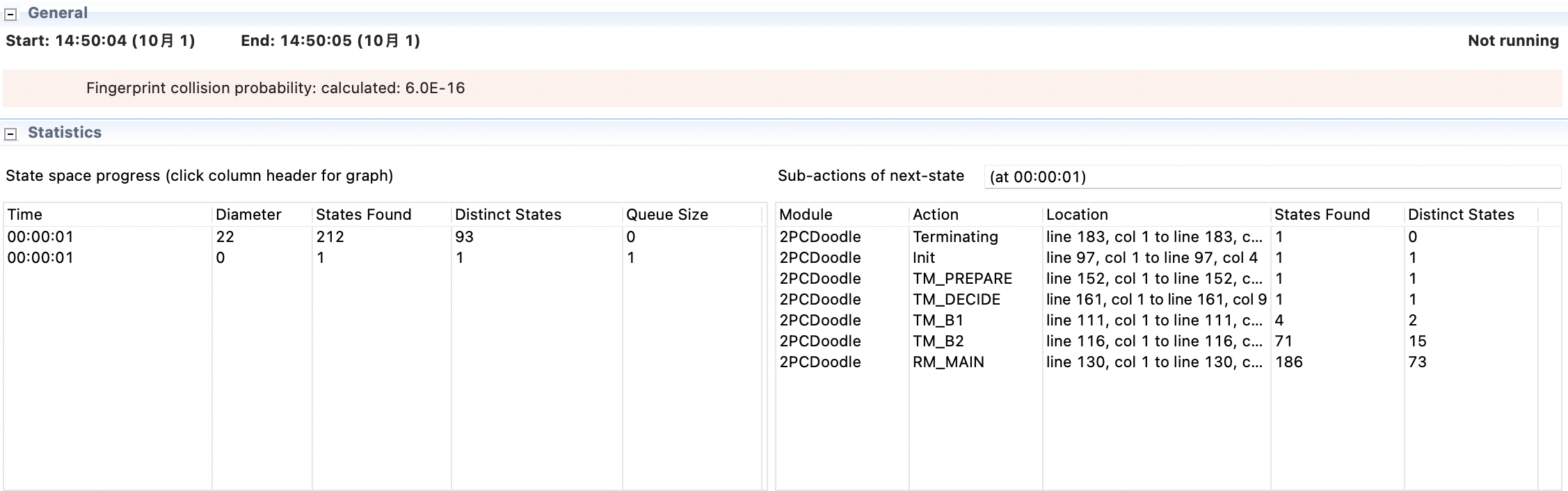
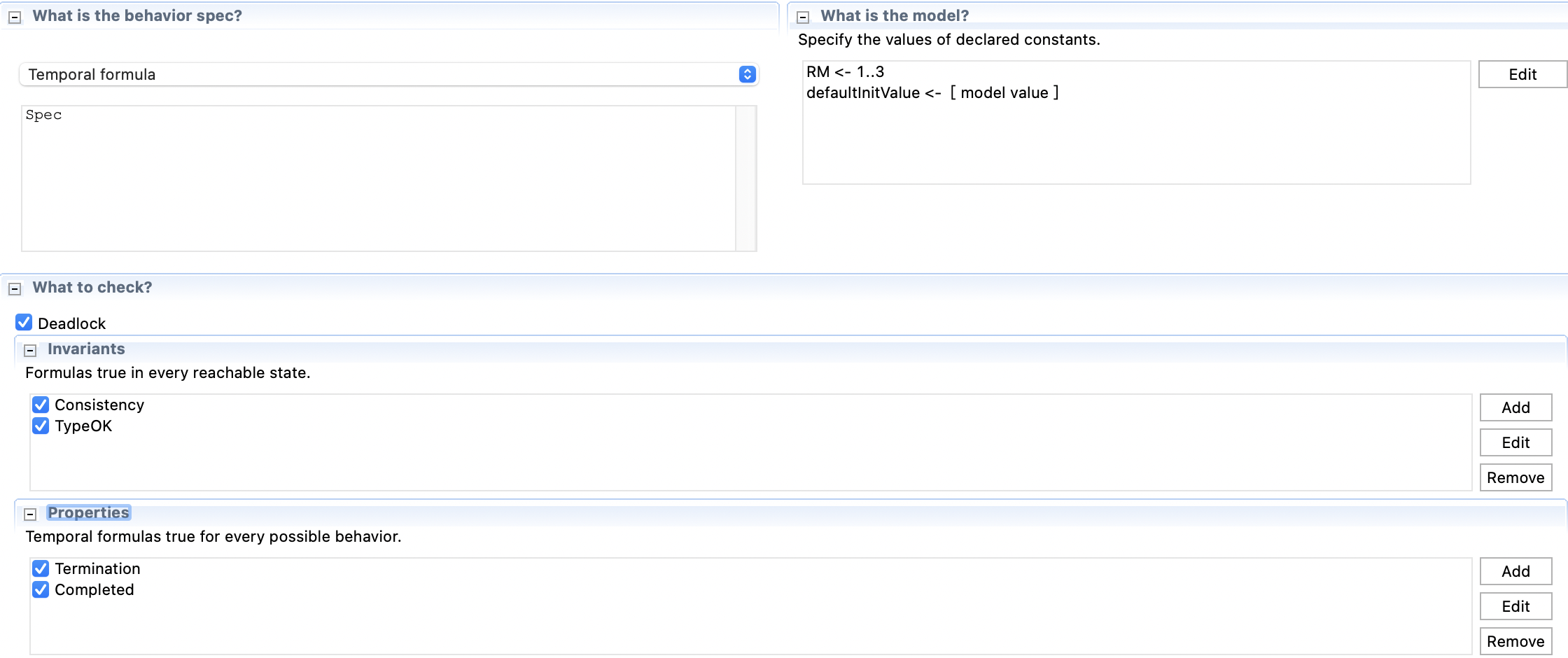
Model checking
我们设置有三个RM,然后添加对应的Invariants和Temporal Properties,然后就可以运行了,在这个模型下其实状态很少,只有212个。主要原因就是不论是RM还是TM都不会出现crash的情况。在后面的几篇中,我们会逐步的模拟真实场景,不断完善这个2PC算法。