2PC in TLA+, step 3
面对真实的世界…
2PC with RM and TM crash
在第二篇中,我们完善了我们的2PC模型,允许任何RM挂掉,并且能够通过日志进行恢复。这一篇中我们将进一步完善,允许TM挂掉,如果没有看过前两篇的,请先阅读最好尝试在TLA+ toolbox运行之前的模型,才能有更深刻的理解。
How to handle TM crash
有一种处理TM挂掉的方式是:一旦有TM挂掉之后,由一个备份的TM来接管这个事务。BTM一旦发现TM挂掉之后,就会根据所有RM的状态,重新决策事务应该commit或者abort。为了简化模型,BTM不再会挂掉。我们可以简单看下它的BTM描述:
fair process (BTManager = 10) {
BTM:
either {
await canCommit /\ tmState = "unavailable";
BTC:
tmState := "commit";
} or {
await canAbort /\ tmState = "unavailable";
BTA:
tmState := "abort";
}
}
当旧的TM状态变为unavailable之后,BTM就会启用(通过await等到条件成立),然后根据canCommit或者canAbort是否成立,决定commit或者abort事务。事实上,简单通过BTM来接管事务,是会破坏模型的一致性的。比如当有两个RM时:
- 所有RM都prepared,TM决定commit,只发送给了RM1,然后TM挂掉 ,两个RM状态为«prepared, prepared»
- RM2挂掉,变成unavailable状态,两个RM状态为«prepared, unavailable»
- BTM尝试接管这个事务,发现RM2不可用,决定abort事务,随后RM2恢复,两个RM状态为«prepared, working»
- RM1此时开始处理TM发送的commit决定,两个RM状态变为«committed, working»
- RM2收到BTM的abort决定,状态变为«committed, aborted»
到最后出现一个RM状态为committed,另一个RM状态为aborted,显然不满足事务的要么全成功要么全失败的特性。那么这个模型问题出在哪里呢?关键点在于这个模型中有两个决策者:TM和BTM。两个决策者可能会在不同时间检查系统的状态,因此会在不同时间点看到不同的系统状态,导致两个决策者会做出截然不同的决定。如果整个系统只有一个决策者,就不可能出现上述问题。
所以我们该如何解决这个问题呢?简单思考后,有几种办法:
- 如果TM和BTM通过一致性协议达成共识,那就不可能出现决策不同的情况。当然不管引入Paxos还是Raft,这都对2PC的性能或者实现复杂度提出了挑战。
- 如果BTM一直等待到所有RM都恢复呢?虽然此时BTM无法做出决策,不会破坏一致性,但会破坏Livness,因为RM一直不恢复,事务就永远无法推进。
- 如果TM挂掉之后,不再引入BTM,而是在超过一段时间之后,RM自动abort事务呢?我们今天会采用这种办法进行尝试。
Handle TM crash asynchronously
首先,我们在之前模型的基础上,允许TM挂掉:
macro tmCrash() {
await TMMAYFAIL;
tmState["live"] := FALSE;
}
fair process (TManager = 0)
variables idx = 1;
{
TM:
while (~ \A rm \in RM : pc[rm] = "Done") {
either {
await canCommit \/ tmState["state"] = "commit";
tmState["state"] := "commit";
TM_CRASH_WHEN_COMMIT:
either {
call broadcast([type |-> "commit"]);
} or {
tmCrash();
}
} or {
await canAbort \/ tmState["state"] = "abort";
tmState["state"] := "abort";
TM_CRASH_WHEN_ABORT:
either {
call broadcast([type |-> "abort"]);
} or {
tmCrash();
}
} or {
await tmState["state"] = "init";
await ~(canCommit \/ canAbort);
TM_CRASH_WHEN_PREPARE:
either {
call broadcast([type |-> "prepare"]);
} or {
tmCrash();
}
}
}
}
我们对tmState新增了一个live字段,用来标识TM是否还在正常工作。然后在preapre/commit/abort的分支中,允许TM在做出决策后,要么广播这个决策,要么直接挂掉。
这也是个简化模型,TM至少可以再做出决策前、做出决策后、广播中途以及广播之后挂掉,为了提高验证速度,我们只模拟做出决策后挂掉这一个场景。
然后,当RM发现TM挂掉之后,RM根据之前做的tmState[“state”]也就是事务状态,决定自身是commit还是abort这个事务。我们只需要对RM进行很少的修改即可:
fair process (RManager \in RM)
variables msg = <<>>, crash_state = "";
{
RM_MAIN:
while (rmState[self] \notin {"committed", "aborted"}) {
either {
recv(msg);
either {
if (rmState[self] = "working" /\ msg.type = "prepare") {
rmState[self] := "prepared";
} else if (rmState[self] = "prepared" /\ msg.type = "commit") {
rmState[self] := "committed";
} else if ((rmState[self] = "working" \/ (rmState[self] = "prepared" /\ tmState["state"] = "abort"))
/\ msg.type = "abort") {
rmState[self] := "aborted";
}
} or {
await RMMAYFAIL /\ (crash_state /= rmState[self]);
RM_CRASH:
crash_state := rmState[self];
rmMsg[self] := {};
rmState[self] := "unavailable";
RM_RECOVER:
rmMsg[self] := {};
rmState[self] := crash_state;
}
} or {
if (tmState["live"] = FALSE) {
if (tmState["state"] /= "commit") {
rmState[self] := "aborted";
} else {
rmState[self] := "committed";
}
}
}
}
}
在外层either-or中新增一个分支,如果发现tmState[”live”]为FALSE,判断tmState["state"],进而决策这个事务。如果事务决议是commit,那么就将自身状态改为committed,如果事务决议不是commit,则将自身状态改为aborted。
我们使用两个RM来进行下验证,TLC的参数如下所示:
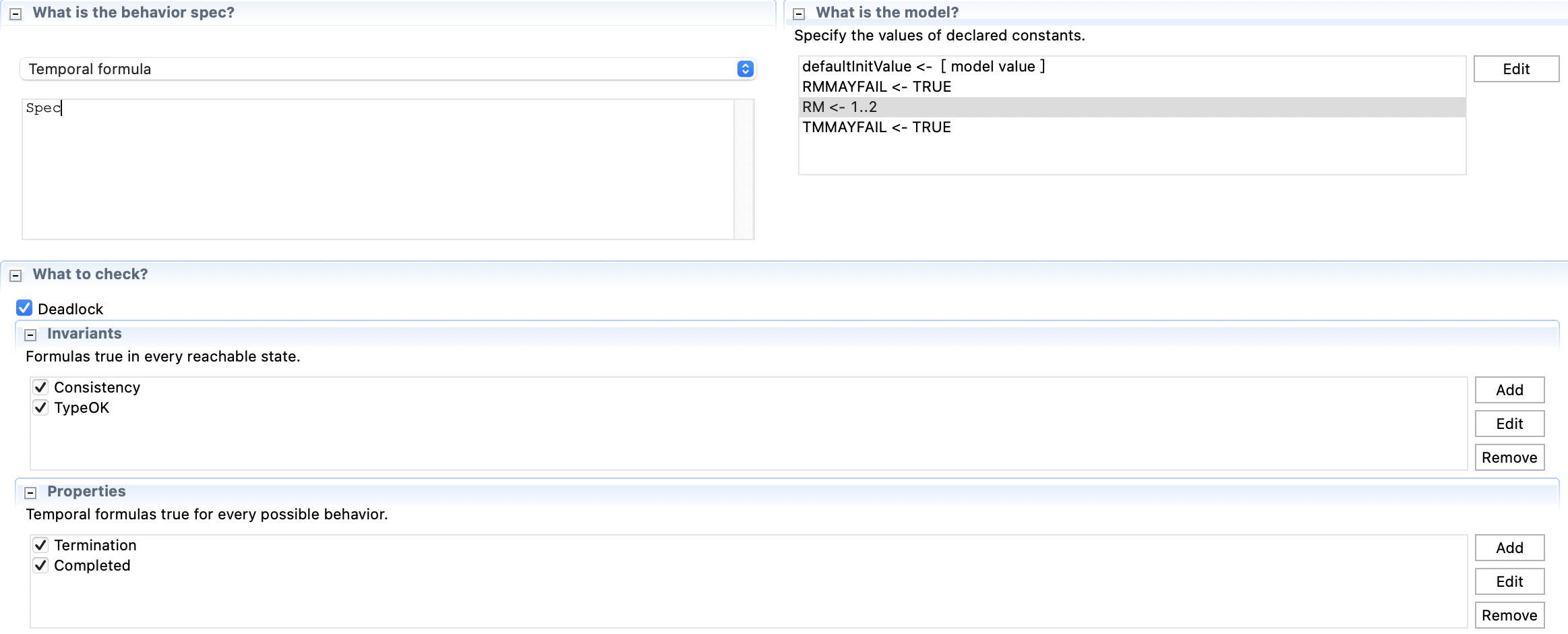
最后成功通过验证:

Does it really works?
之前尝试添加RM挂掉这个功能时,我们对模型进行了无数次修改最终才通过验证。为什么这次允许TM挂掉时如此顺利,不禁思考,我们的这个算法为什么能够成立?又或者我们做了什么简化?
if (tmState["live"] = FALSE) {
if (tmState["state"] /= "commit") {
rmState[self] := "aborted";
} else {
rmState[self] := "committed";
}
}
事实上,我们的确做了很多理想中的简化:
首先,TM在挂掉之前将tmState[”live”]置为了FALSE,并且后续RM通过这个状态进行了相应决策。现实世界中,TM可能在任何情况挂掉,也就不可能保证在挂掉之前修改某个状态。其次,如果没有一个标志能表示TM是否仍在工作,在分布式系统中,显然RM就无法对TM进行判活。任何一个TM在RM的视角中,都是一只薛定谔的猫,无法判断其是否存活。
事实上,很多目前的分布式数据库实现中,的确也存在若干类似的假设和简化。比如Percolator模型中如果coordinator在commit之前挂掉,primary和secondary都遗留了若干写入的锁,印象里论文里是通过超时清除的。TiDB好像就是沿用了这种办法。
Souce code
最后附上一个完整的实现吧,有兴趣的可以玩玩。
----------------------------- MODULE 2PCDoodle -----------------------------
EXTENDS Integers, Sequences, FiniteSets, TLC
CONSTANT
RM, \* The set of participating resource managers, e.g. RM=1..3
RMMAYFAIL, \* Whether RM may fail
TMMAYFAIL \* Whether TM may fail
(***************************************************************************
\* 允许RM挂掉 RM可以根据日志从不可用状态恢复到挂掉之前的状态
--fair algorithm 2PC {
variable
rmState = [rm \in RM |-> "working"],
rmMsg = [rm \in RM |-> {}],
tmState = [state |-> "init", live |-> TRUE];
define {
canCommit == /\ \A rm \in RM : rmState[rm] \in {"prepared"}
/\ tmState["state"] /= "abort"
canAbort == /\ \E rm \in RM :rmState[rm] \in {"aborted", "unavailable"}
/\ tmState["state"] /= "commit"
}
macro send(dst, msg) {
rmMsg[dst] := rmMsg[dst] \union {msg};
}
macro recv(msg) {
await rmMsg[self] /= {};
msg := CHOOSE one \in rmMsg[self] : TRUE;
rmMsg[self] := rmMsg[self] \ {msg};
}
macro tmCrash() {
await TMMAYFAIL;
tmState["live"] := FALSE;
}
procedure broadcast(message) {
TM_B1:
idx := 1;
TM_B2:
while (idx <= Cardinality(RM)) {
send(idx, message);
idx := idx + 1;
};
return;
}
fair process (RManager \in RM)
variables msg = <<>>, crash_state = "";
{
RM_MAIN:
while (rmState[self] \notin {"committed", "aborted"}) {
either {
recv(msg);
either {
if (rmState[self] = "working" /\ msg.type = "prepare") {
rmState[self] := "prepared";
} else if (rmState[self] = "prepared" /\ msg.type = "commit") {
rmState[self] := "committed";
} else if ((rmState[self] = "working" \/ (rmState[self] = "prepared" /\ tmState["state"] = "abort"))
/\ msg.type = "abort") {
rmState[self] := "aborted";
}
} or {
await RMMAYFAIL /\ (crash_state /= rmState[self]);
RM_CRASH:
crash_state := rmState[self];
rmMsg[self] := {};
rmState[self] := "unavailable";
RM_RECOVER:
rmMsg[self] := {};
rmState[self] := crash_state;
}
} or {
if (tmState["live"] = FALSE) {
if (tmState["state"] /= "commit") {
rmState[self] := "aborted";
} else {
rmState[self] := "committed";
}
}
}
}
}
fair process (TManager = 0)
variables idx = 1;
{
TM:
while (~ \A rm \in RM : pc[rm] = "Done") {
either {
await canCommit \/ tmState["state"] = "commit";
tmState["state"] := "commit";
TM_CRASH_WHEN_COMMIT:
either {
call broadcast([type |-> "commit"]);
} or {
tmCrash();
}
} or {
await canAbort \/ tmState["state"] = "abort";
tmState["state"] := "abort";
TM_CRASH_WHEN_ABORT:
either {
call broadcast([type |-> "abort"]);
} or {
tmCrash();
}
} or {
await tmState["state"] = "init";
await ~(canCommit \/ canAbort);
TM_CRASH_WHEN_PREPARE:
either {
call broadcast([type |-> "prepare"]);
} or {
tmCrash();
}
}
}
}
}
***************************************************************************)
\* BEGIN TRANSLATION (chksum(pcal) = "25e2021c" /\ chksum(tla) = "47fff3dd")
CONSTANT defaultInitValue
VARIABLES rmState, rmMsg, tmState, pc, stack
(* define statement *)
canCommit == /\ \A rm \in RM : rmState[rm] \in {"prepared"}
/\ tmState["state"] /= "abort"
canAbort == /\ \E rm \in RM :rmState[rm] \in {"aborted", "unavailable"}
/\ tmState["state"] /= "commit"
VARIABLES message, msg, crash_state, idx
vars == << rmState, rmMsg, tmState, pc, stack, message, msg, crash_state, idx
>>
ProcSet == (RM) \cup {0}
Init == (* Global variables *)
/\ rmState = [rm \in RM |-> "working"]
/\ rmMsg = [rm \in RM |-> {}]
/\ tmState = [state |-> "init", live |-> TRUE]
(* Procedure broadcast *)
/\ message = [ self \in ProcSet |-> defaultInitValue]
(* Process RManager *)
/\ msg = [self \in RM |-> <<>>]
/\ crash_state = [self \in RM |-> ""]
(* Process TManager *)
/\ idx = 1
/\ stack = [self \in ProcSet |-> << >>]
/\ pc = [self \in ProcSet |-> CASE self \in RM -> "RM_MAIN"
[] self = 0 -> "TM"]
TM_B1(self) == /\ pc[self] = "TM_B1"
/\ idx' = 1
/\ pc' = [pc EXCEPT ![self] = "TM_B2"]
/\ UNCHANGED << rmState, rmMsg, tmState, stack, message, msg,
crash_state >>
TM_B2(self) == /\ pc[self] = "TM_B2"
/\ IF idx <= Cardinality(RM)
THEN /\ rmMsg' = [rmMsg EXCEPT ![idx] = rmMsg[idx] \union {message[self]}]
/\ idx' = idx + 1
/\ pc' = [pc EXCEPT ![self] = "TM_B2"]
/\ UNCHANGED << stack, message >>
ELSE /\ pc' = [pc EXCEPT ![self] = Head(stack[self]).pc]
/\ message' = [message EXCEPT ![self] = Head(stack[self]).message]
/\ stack' = [stack EXCEPT ![self] = Tail(stack[self])]
/\ UNCHANGED << rmMsg, idx >>
/\ UNCHANGED << rmState, tmState, msg, crash_state >>
broadcast(self) == TM_B1(self) \/ TM_B2(self)
RM_MAIN(self) == /\ pc[self] = "RM_MAIN"
/\ IF rmState[self] \notin {"committed", "aborted"}
THEN /\ \/ /\ rmMsg[self] /= {}
/\ msg' = [msg EXCEPT ![self] = CHOOSE one \in rmMsg[self] : TRUE]
/\ rmMsg' = [rmMsg EXCEPT ![self] = rmMsg[self] \ {msg'[self]}]
/\ \/ /\ IF rmState[self] = "working" /\ msg'[self].type = "prepare"
THEN /\ rmState' = [rmState EXCEPT ![self] = "prepared"]
ELSE /\ IF rmState[self] = "prepared" /\ msg'[self].type = "commit"
THEN /\ rmState' = [rmState EXCEPT ![self] = "committed"]
ELSE /\ IF (rmState[self] = "working" \/ (rmState[self] = "prepared" /\ tmState["state"] = "abort"))
/\ msg'[self].type = "abort"
THEN /\ rmState' = [rmState EXCEPT ![self] = "aborted"]
ELSE /\ TRUE
/\ UNCHANGED rmState
/\ pc' = [pc EXCEPT ![self] = "RM_MAIN"]
\/ /\ RMMAYFAIL /\ (crash_state[self] /= rmState[self])
/\ pc' = [pc EXCEPT ![self] = "RM_CRASH"]
/\ UNCHANGED rmState
\/ /\ IF tmState["live"] = FALSE
THEN /\ IF tmState["state"] /= "commit"
THEN /\ rmState' = [rmState EXCEPT ![self] = "aborted"]
ELSE /\ rmState' = [rmState EXCEPT ![self] = "committed"]
ELSE /\ TRUE
/\ UNCHANGED rmState
/\ pc' = [pc EXCEPT ![self] = "RM_MAIN"]
/\ UNCHANGED <<rmMsg, msg>>
ELSE /\ pc' = [pc EXCEPT ![self] = "Done"]
/\ UNCHANGED << rmState, rmMsg, msg >>
/\ UNCHANGED << tmState, stack, message, crash_state, idx >>
RM_CRASH(self) == /\ pc[self] = "RM_CRASH"
/\ crash_state' = [crash_state EXCEPT ![self] = rmState[self]]
/\ rmMsg' = [rmMsg EXCEPT ![self] = {}]
/\ rmState' = [rmState EXCEPT ![self] = "unavailable"]
/\ pc' = [pc EXCEPT ![self] = "RM_RECOVER"]
/\ UNCHANGED << tmState, stack, message, msg, idx >>
RM_RECOVER(self) == /\ pc[self] = "RM_RECOVER"
/\ rmMsg' = [rmMsg EXCEPT ![self] = {}]
/\ rmState' = [rmState EXCEPT ![self] = crash_state[self]]
/\ pc' = [pc EXCEPT ![self] = "RM_MAIN"]
/\ UNCHANGED << tmState, stack, message, msg, crash_state,
idx >>
RManager(self) == RM_MAIN(self) \/ RM_CRASH(self) \/ RM_RECOVER(self)
TM == /\ pc[0] = "TM"
/\ IF ~ \A rm \in RM : pc[rm] = "Done"
THEN /\ \/ /\ canCommit \/ tmState["state"] = "commit"
/\ tmState' = [tmState EXCEPT !["state"] = "commit"]
/\ pc' = [pc EXCEPT ![0] = "TM_CRASH_WHEN_COMMIT"]
\/ /\ canAbort \/ tmState["state"] = "abort"
/\ tmState' = [tmState EXCEPT !["state"] = "abort"]
/\ pc' = [pc EXCEPT ![0] = "TM_CRASH_WHEN_ABORT"]
\/ /\ tmState["state"] = "init"
/\ ~(canCommit \/ canAbort)
/\ pc' = [pc EXCEPT ![0] = "TM_CRASH_WHEN_PREPARE"]
/\ UNCHANGED tmState
ELSE /\ pc' = [pc EXCEPT ![0] = "Done"]
/\ UNCHANGED tmState
/\ UNCHANGED << rmState, rmMsg, stack, message, msg, crash_state, idx >>
TM_CRASH_WHEN_COMMIT == /\ pc[0] = "TM_CRASH_WHEN_COMMIT"
/\ \/ /\ /\ message' = [message EXCEPT ![0] = [type |-> "commit"]]
/\ stack' = [stack EXCEPT ![0] = << [ procedure |-> "broadcast",
pc |-> "TM",
message |-> message[0] ] >>
\o stack[0]]
/\ pc' = [pc EXCEPT ![0] = "TM_B1"]
/\ UNCHANGED tmState
\/ /\ TMMAYFAIL
/\ tmState' = [tmState EXCEPT !["live"] = FALSE]
/\ pc' = [pc EXCEPT ![0] = "TM"]
/\ UNCHANGED <<stack, message>>
/\ UNCHANGED << rmState, rmMsg, msg, crash_state, idx >>
TM_CRASH_WHEN_ABORT == /\ pc[0] = "TM_CRASH_WHEN_ABORT"
/\ \/ /\ /\ message' = [message EXCEPT ![0] = [type |-> "abort"]]
/\ stack' = [stack EXCEPT ![0] = << [ procedure |-> "broadcast",
pc |-> "TM",
message |-> message[0] ] >>
\o stack[0]]
/\ pc' = [pc EXCEPT ![0] = "TM_B1"]
/\ UNCHANGED tmState
\/ /\ TMMAYFAIL
/\ tmState' = [tmState EXCEPT !["live"] = FALSE]
/\ pc' = [pc EXCEPT ![0] = "TM"]
/\ UNCHANGED <<stack, message>>
/\ UNCHANGED << rmState, rmMsg, msg, crash_state, idx >>
TM_CRASH_WHEN_PREPARE == /\ pc[0] = "TM_CRASH_WHEN_PREPARE"
/\ \/ /\ /\ message' = [message EXCEPT ![0] = [type |-> "prepare"]]
/\ stack' = [stack EXCEPT ![0] = << [ procedure |-> "broadcast",
pc |-> "TM",
message |-> message[0] ] >>
\o stack[0]]
/\ pc' = [pc EXCEPT ![0] = "TM_B1"]
/\ UNCHANGED tmState
\/ /\ TMMAYFAIL
/\ tmState' = [tmState EXCEPT !["live"] = FALSE]
/\ pc' = [pc EXCEPT ![0] = "TM"]
/\ UNCHANGED <<stack, message>>
/\ UNCHANGED << rmState, rmMsg, msg, crash_state, idx >>
TManager == TM \/ TM_CRASH_WHEN_COMMIT \/ TM_CRASH_WHEN_ABORT
\/ TM_CRASH_WHEN_PREPARE
(* Allow infinite stuttering to prevent deadlock on termination. *)
Terminating == /\ \A self \in ProcSet: pc[self] = "Done"
/\ UNCHANGED vars
Next == TManager
\/ (\E self \in ProcSet: broadcast(self))
\/ (\E self \in RM: RManager(self))
\/ Terminating
Spec == /\ Init /\ [][Next]_vars
/\ WF_vars(Next)
/\ \A self \in RM : WF_vars(RManager(self))
/\ WF_vars(TManager) /\ WF_vars(broadcast(0))
Termination == <>(\A self \in ProcSet: pc[self] = "Done")
\* END TRANSLATION
(***************************************************************************)
(* The invariants: *)
(***************************************************************************)
Consistency ==
(*************************************************************************)
(* A "state" predicate asserting that two RMs have not arrived at *)
(* conflicting decisions. *)
(*************************************************************************)
\A rm1, rm2 \in RM : ~ /\ rmState[rm1] = "aborted"
/\ rmState[rm2] = "committed"
Completed == <> (\A rm \in RM : rmState[rm] \in {"committed","aborted"})
NotCommitted == \A rm \in RM : rmState[rm] /= "committed"
TypeOK ==
(*************************************************************************)
(* The type-correctness invariant *)
(*************************************************************************)
/\ rmState \in [RM -> {"working", "prepared", "committed", "aborted", "unavailable"}]
/\ tmState["state"] \in {"init", "commit", "abort", "unavailable"}
=============================================================================
\* Modification History
\* Last modified Mon Oct 03 21:01:40 CST 2022 by doodle
\* Last modified Thu Dec 20 13:23:34 PST 2018 by mad
\* Last modified Tue Oct 11 08:14:15 PDT 2011 by lamport
\* Created Mon Oct 10 05:31:02 PDT 2011 by lamport
Started as a modification of P2TCommit at http://lamport.azurewebsites.net/tla/two-phase.html
Transaction manager (TM) is added.
Failures added
Backup Transaction Manager (BTM) added.
Conclusions
到这,2PC in TLA+这个小系列应该到一段落了。这是第一次尝试在TLA+中去实现一个分布式算法,的确有些收获。当然,也不得不吐槽下,可能是因为学习曲线过于陡峭,又或者没有掌握到很多实现技巧,又或者toolbox的报错信息是在不忍直视,导致用TLA+写一个看起来很容易的算法,实际上苦难重重。希望之后还有机会,能花点时间继续学习吧,陪娃去了~