Deciphering C++ Coroutines, part 3
Asymmetric transfer vs Symmetric transfer.
Asymmetric transfer reviewed
上一篇结尾时我们提到:Resume continuation就是Asymmetric transfer,为什么会称为非对称转移呢?
我们首先回顾下上一篇例子中,控制流是如何在caller和callee之间转移的。
SimpleTask<int> caller() {
std::cout << " > caller()\n";
int result = co_await callee();
std::cout << " > caller: result = " << result << "\n";
co_return result * 2;
}
- caller → callee
void await_suspend(std::coroutine_handle<> continuation) noexcept {
handle_.promise().continuation_ = continuation;
handle_.resume();
}
通过在co_await callee中的Awaiter::await_suspend,将caller的coroutine_handle保存到callee的promise中,然后调用.resume()恢复callee执行。注意callee的协程栈会在当前调用栈的基础上展开,只有当callee执行完成之后,相关的栈才会释放。
- callee → caller
void await_suspend(std::coroutine_handle<promise_type> h) noexcept {
auto continuation = h.promise().continuation_;
if (continuation) {
continuation.resume();
}
}
当callee的协程体执行完之后,在co_await callee_promise.final_suspend时,在对应的FinalAwaiter::await_suspend中,通过promise获取到caller的coroutine_handle,然后调用.resume()恢复caller执行。注意caller的协程栈会在当前调用栈的基础上展开,只有当caller执行完成之后,相关的栈才会释放。
在上一篇提到过,这里再强调下:无论谁来调用
.resume都一样,.resume的调用方在调用时,都会像一个普通函数调用一样,在当前栈的基础上增长出恢复的协程栈。
乍一看,都是在某个Awaiter的await_suspend中恢复了另一个协程。但其实二者有以下不同:
- 前者是父协程恢复子协程,后者是子协程恢复父协程。
- 前者是发生在
co_await表达式时,后者则是协程函数体执行完,控制流到final_suspend时。
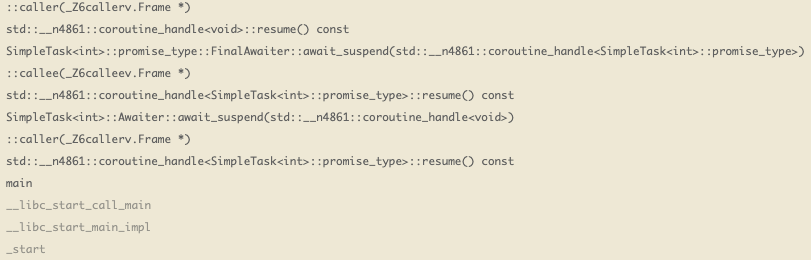
正是因为有这些控制流传递过程中的不同,它才被称为Asymmetric transfer。除此之外,在调用栈上也能看到控制流从caller传递给callee,又传递给了caller,造成调用栈的层次不断变深。即每次调用.resume()时,我们都会创建一个新的stack frame给要恢复的协程,这会导致实际运用中出现stack overflow。
main()
└─ caller协程体
└─ Awaiter::await_suspend(caller's handle)
└─ handle_.resume() // caller -> callee
└─ callee协程体
└─ FinalAwaiter::await_suspend(callee's handle)
└─ continuation.resume() // callee -> caller
└─ caller协程体
└─ Awaiter::await_resume()
实际运行上一篇给出的例子,也能在gdb中也能看到如下的调用栈,出现了caller → callee → caller这样的嵌套执行,以及.resume()时都会生成新的stack frame。
Symmetric transfer
我们看下Symmetric transfer是怎么解决.resume()时栈变深的问题。Symmetric transfer最初是在这篇标准提案被提议,最终被纳入到标准中的。其核心是:当一个协程需要切换到另一个协程时,不再通过显式的调用resume()来恢复协程,而是通过返回一个coroutine_handle来告知,控制流应该交给哪个协程,然后跳转到这个协程继续执行。
主要引入的修改就是Awaiter::await_suspend,我们之前提到过它有两种类型的返回值:
- 返回
void的await_suspend()会无条件地将控制流转移回协程的调用方/恢复方。 - 返回
bool的await_suspend()在返回false时表示立即恢复协程并继续执行,而返回true会将控制流转移回协程的调用方/恢复方。
实际上还有第三种情况,也就是这个提案中提议的:
- 返回一个
std::coroutine_handle<T>。即返回一个std::coroutine_handle<T>,表明控制流应该对称地移交到由返回的coroutine_handle所标识的协程。另外提供了一个特殊标识std::noop_coroutine_handle,用于标识没有要恢复的协程,控制流会直接返回给当前协程的调用方或者恢复方。
也就是说,在Symmetric transfer中,我们只是简单地挂起一个协程并恢复另一个协程。它和Asymmetric transfer的一个重要区别在于:两个协程之间没有隐含的调用者/被调用者关系,当一个协程挂起时,它可以将执行流移交给任何被挂起的协程(包括它自己),并且在下次挂起或完成时,不一定要将执行流移交回之前的那个协程。
co_await reviewed
根据标准来说,Symmetric transfer并不要做很多修改,只需要在协程需要挂起时,在对应的Awaiter::await_suspend中返回一个 coroutine_handle,表明控制流应该对称地移交到由返回的coroutine_handle所标识的协程。进一步的问题是,控制流是怎么交给这个协程的?
要回答这个问题,我们需要了解编译器在Symmetric transfer情况是如何展开co_await。
{
auto&& value = <expr>;
auto&& awaitable = get_awaitable(promise, static_cast<decltype(value)>(value));
auto&& awaiter = get_awaiter(static_cast<decltype(awaitable)>(awaitable));
if (!awaiter.await_ready()) {
using handle_t = std::coroutine_handle<promise_type>;
<suspend-coroutine>
auto next = awaiter.await_suspend(handle_t::from_promise(promise));
next.resume();
return; // <return-to-caller-or-resumer>
resume_point_label:
<resume-point>
}
return awaiter.await_resume();
}
注意在第一篇中我们介绍co_await被展开的代码中,当await_suspend返回void或者true时,会直接<return-to-caller-or-resumer>,即控制流会被返回给调用方/恢复方。
而在Symmetric transfer中,按我们上面所说的语义,它需要恢复await_suspend返回的coroutine_handle,并且恢复这个协程即next.resume();。而<return-to-caller-or-resumer>部分则会被编译器处理为一个return;语句。
也就是说,当我们通过.resume()恢复一个协程时,在这个协程体执行过程中,又通过对称转移调用了另一个.resume(),而之后的return;语句会使控制流回到最初.resume()的调用方。注意到两次.resume()的函数声明完全一致,本质上就是一个tail call。
co_await reviewed again
不幸的是,我前面隐藏了一些事实,编译器生成的实际代码并不和上面的示例完全一致。准确说,编译器生成的代码中并没有next.resume(),我们下面就会说到这一点。
SimpleTask<int> caller() {
std::cout << " > caller()\n";
int result = co_await callee();
std::cout << " > caller: result = " << result << "\n";
co_return result * 2;
}
我们这里直接给出一个对称转移的例子,整体流程和上一篇介绍Asymmetric transfer时一样,只修改了await_suspend部分代码(具体改动在后面)。可以把代码中caller协程放到cppinsight中,恢复函数会被展开如下的示意代码,这里为了容易理解做了一些命名调整和逻辑简化:
void caller_resume(__callerFrame* frame) {
try {
switch (frame->suspend_index) {
case 0: break;
case 2: goto resume_point_1;
case 4: goto resume_point_2;
case 6: goto resume_point_3;
}
// initial_suspend
frame->initial_awaiter = frame->promise.initial_suspend();
if (!frame->initial_awaiter.await_ready()) {
frame->initial_awaiter.await_suspend(
std::coroutine_handle<SimpleTask<int>::promise_type>::from_address(frame)
);
frame->suspend_index = 2;
frame->initial_await_called = true;
return;
}
resume_point_1:
frame->initial_awaiter.await_resume();
std::cout << " > caller()\n";
// co_await callee()
frame->callee_awaiter = callee().operator co_await();
if (!frame->callee_awaiter.await_ready()) {
auto next = frame->callee_awaiter.await_suspend(
std::coroutine_handle<SimpleTask<int>::promise_type>::from_address(frame)
);
if (next.address()) {
frame->suspend_index = 4;
return;
}
}
resume_point_2:
frame->result = frame->callee_awaiter.await_resume();
std::cout << " > caller: result = " << frame->result << "\n";
frame->promise.return_value(frame->result * 2);
goto final_suspend;
} catch (...) {
if (!frame->initial_await_called) throw;
frame->promise.unhandled_exception();
}
final_suspend:
// final_suspend
frame->final_awaiter = frame->promise.final_suspend();
if (!frame->final_awaiter.await_ready()) {
auto next = frame->final_awaiter.await_suspend(
std::coroutine_handle<SimpleTask<int>::promise_type>::from_address(frame)
);
if (next.address()) {
frame->suspend_index = 6;
return;
}
}
resume_point_3:
frame->destroy_fn(frame);
}
和上一篇的介绍一样,caller的协程体被展开为一个有限状态机,通过在挂起时调整协程的状态,以便在恢复这个协程时,能跳转到正确的位置继续执行。我们聚焦到关心的对称转移部分:
Awaiter::await_suspend返回了一个coroutine_handle,即代码中的next,控制流应该交给coroutine_handle对应的协程。- 如果
next是一个非空值,即next的确指向一个协程,此时会设置挂起点下标,就立刻返回了。此处会发生一些神奇的事情,包括恢复next协程,最终控制流会返回到当前协程的调用方或者恢复方。(注意next.resume()没有显示出现在这段代码中) - 之后,当
caller协程被最终唤醒时,会继续从resume_point_2开始执行。
为什么说神奇的事情呢,因为甚至标准草案都说的闪烁其词:
If the type of await-suspend is std::coroutine_handle
, *await-suspend*.resume() is evaluated[.](https://eel.is/c++draft/expr.await#5.1.1.sentence-1) This resumes the coroutine referred to by the result of *await-suspend*[.](https://eel.is/c++draft/expr.await#5.1.1.sentence-2) Any number of coroutines can be successively resumed in this fashion, eventually returning control flow to the current coroutine caller or resumer ([[dcl.fct.def.coroutine]](https://eel.is/c++draft/dcl.fct.def.coroutine))[.](https://eel.is/c++draft/expr.await#5.1.1.sentence-3)
以及这是最初对称转移的提案P0913R0中的描述:
If that expression has type
std::experimental::coroutine_handle<Z>and evaluates to a value s, the coroutine referred to by s is resumed as if by a call s.resume(). [Note: Any number of coroutines may be successively resumed in this fashion, eventually returning control flow to the current coroutine caller or resumer (8.4.4) – end note]
标准和草案中都提到,当在Awaiter::await_suspend中返回一个coroutine_handle,它会被恢复。但也提到了,这期间可能会恢复若干个协程,并且最终控制流会回到当前协程的调用方或恢复方。
关于所谓神奇的事情,我们在这只需要知道,编译器实际生成的代码中不会直接出现类似next.resume()的调用,而是会以直接跳转的形式,恢复对称转移返回的coroutine_handle对应协程执行。这里需要再补充一些背景知识,具体的机制,我们会结合代码再介绍。
从另一方面角度来说,协程体之所以会被编译器处理为固定的一个格式,也正是因为对称转移。即在std::coroutine_handle::resume()中,又需要以某种形式调用另一个std::coroutine_handle::resume()并返回。为了避免栈的增长,于是想以tail call优化的形式解决这个问题。
Tail call可以理解为:
For compilers generating assembly directly, tail-call elimination is easy: it suffices to replace a call opcode with a jump one, after fixing parameters on the stack.
也就是,在条件允许的情况下,编译器可以用一个jump指令,替代call和ret指令。
; before
foo:
call B
call A
ret
; after
foo:
call B
jmp A
tail call优化的前提如下所示,而正是为了使得协程能够满足tail call的条件,编译器才把协程体处理为前述的格式:
- 调用约定(calling convention)支持尾调用,并且调用方和被调用方的调用约定相同:可以看到编译器中把整个协程分为了两部分,构造和初始化coroutine的一个函数(被称为
ramp),以及包含协程体、协程状态机的函数(称为body,比如上面的caller_resume)。编译器这样处理,就能保证能保证调用约定的要求。 - 返回类型相同:都是调用
std::coroutine_handle::resume(),返回类型都是void - 在返回到调用方之前,不需要在调用之后执行任何non-trivial析构函数:协程中所有生命周期可能会跨越挂起点的所有对象,都会被保存在coroutine frame中,不需要调用回调。而生命周期不跨越挂起点的对象,比如局部变量,都会在挂起之前已经析构。
调用不在try/catch 块内部:我们可以看到coroutine body中是有try/catch的,而按这篇博客里的说法,而编译器通过前述把.resume()从body部分挪出去的手段,使协程满足了这个要求。
Demo
了解了对称转移的原理之后,我们结合demo再看下具体改动。大体流程和上一篇中介绍Asymmetric transfer时几乎完全一致,其中只有Awaiter::await_suspend和FinalAwaiter::await_suspend的地方稍有不同(即转移控制流的地方),下面会具体分析。
按照唯二的不同点如下:
Awaiter::await_suspend:- Asymmetric transfer中,
caller在co_await callee();时发现要保存caller的coroutine_handle,然后手动恢复callee继续执行。 - 而Symmetric transfer中,我们不再手动恢复子协程
callee,而是直接返回它的coroutine_handle。
- Asymmetric transfer中,
/*
// Asymmetric transfer
void await_suspend(std::coroutine_handle<> continuation) noexcept {
handle_.promise().continuation_ = continuation;
handle_.resume();
}
*/
// Symmetric transfer
std::coroutine_handle<> await_suspend(std::coroutine_handle<> continuation) noexcept {
handle_.promise().continuation_ = continuation;
return handle_;
}
FinalAwaiter::await_suspend:- Asymmetric transfer中,当
callee协程体执行完时,检查promise中是否有设置过要恢复的协程,如果有则直接恢复。 - 而Symmetric transfer中,当
callee协程体执行完时,检查promise中是否有设置过要恢复的协程,如果有则返回它的coroutine_handle,代表控制流要交给这个协程(即例子中的caller),否则返回一个空值。
- Asymmetric transfer中,当
/*
// Asymmetric transfer
void await_suspend(std::coroutine_handle<promise_type> h) noexcept {
auto continuation = h.promise().continuation_;
if (continuation) {
continuation.resume();
}
}
*/
// Symmetric transfer: Return the next coroutine to transfer to, or noop if none.
std::coroutine_handle<> await_suspend(std::coroutine_handle<promise_type> h) noexcept {
auto continuation = h.promise().continuation_;
if (continuation) {
return continuation;
}
return std::noop_coroutine();
}
总结一下两处改动,都是在await_suspend中返回一个coroutine_handle,代表控制流需要需要转移到这个协程。
实际运行这个例子,在gdb中可以发现Symmetric transfer和Asymmetric transfer的调用栈不同,虽然仍然出现了caller → callee → caller这样的嵌套执行,但是并不会出现.resume()这样的stack frame了。
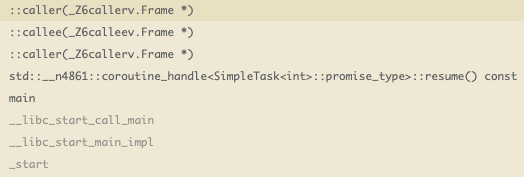
下面我们会直接走读这个demo的汇编,查看关键步骤的栈帧和堆的状态,揭开对称转移的真实面目。
Symmetric transfer details
Backgrounds
首先,caller的协程帧数据结构如下,部分变量命名做过调整:
struct __callerFrame {
// +0x00
void (*resume_fn)(__callerFrame*); // 协程状态机函数 即恢复函数指针
void (*destroy_fn)(__callerFrame*); // 析构函数指针
// +0x10
SimpleTask<int>::promise_type promise {
int value;
std::exception_ptr exception;
std::coroutine_handle<> continuation_;
};
// +0x28
std::coroutine_handle<SimpleTask<int>::promise_type> self_handle; // 自身coroutine_handle
// +0x30
int16_t suspend_index; // 挂起点下标 主要用于标识协程状态
bool needs_free; // 是否需要释放
char initial_await_called; // initial_suspend是否已调用
// +0x34
std::suspend_always initial_awaiter; // initial_suspend的Awaiter
// +0x38
int result; // 生命周期跨越挂起点的局部变量
// +0x40
SimpleTask<int>::Awaiter callee_awaiter; // co_await callee()的Awaiter
// +0x48
SimpleTask<int> callee_task; // callee协程的ReturnType对象
// 同时也提供了operator co_await
// +0x50+
SimpleTask<int>::promise_type::FinalAwaiter final_awaiter;
// final_suspend的Awaiter
};
这其中对于理解对称转移最重要的就是resume_fn这个函数指针。每个协程都有一个状态机函数,每次协程开始执行或者被恢复时,都会调用这个状态机函数。而协程当前的状态用suspend_index来表示,即协程当前在哪个挂起点被挂起。
比如caller协程的状态机函数就是上面的caller_resume,协程会根据suspend_index跳转到caller_resume中的不同位置。
实际生成的汇编代码中,caller协程的状态机函数demangle之后命名为
caller(caller()::_Z6callerv.Frame*) [clone .actor]
switch (frame->suspend_index) {
case 0: break;
case 2: goto resume_point_1;
case 4: goto resume_point_2;
case 6: goto resume_point_3;
}
注意到上面给出的状态机代码中,suspend_index没有奇数的原因:偶数代表正常挂起,而奇数代表协程需要销毁。由于挂起点有多个,因此需要从不同的状态进行相应清理的逻辑也不同。比如caller协程的suspend_index对应的完整状态如下:
suspend_index = 0: 初始状态
suspend_index = 1: 销毁时从状态0清理
suspend_index = 2: initial_suspend被挂起
suspend_index = 3: 销毁时从状态2清理
suspend_index = 4: co_await callee()挂起
suspend_index = 5: 销毁时从状态4清理
suspend_index = 6: final_suspend被挂起
suspend_index = 7: 销毁时从状态6清理
状态机函数可能会被调用多次,每次调用时协程处于不同被挂起的挂起点处。除此以外,在汇编代码中,状态机函数与普通函数并没有什么不同,比如都有prologue,即每次函数调用时都有对%rbp和%rsp的相应压栈操作:
0000000000001838 <_Z6callerPZ6callervE16_Z6callerv.Frame.actor>:
1838: endbr64
183c: push %rbp
183d: mov %rsp,%rbp
1840: push %rbx
1841: sub $0x28,%rsp
1845: mov %rdi,-0x28(%rbp)
这里再多提一点,状态机函数的只有一个参数,即协程的coroutine frame指针。每次调用状态机函数,都会把这个指针都保存到了-0x28(%rbp)处。
main → caller
接下来,我们梳理整个demo的执行流程,完整的汇编参见这里(为了便于理解,编译器指定-O0)。caller的状态机函数入口地址为1838,callee的状态机函数入口地址为13fb。
-
main调用caller(),创建协程0000000000001c94 <main>: 1c94: endbr64 1c98: push %rbp 1c99: mov %rsp,%rbp 1c9c: push %rbx 1c9d: sub $0x18,%rsp 1ca1: mov %fs:0x28,%rax 1caa: mov %rax,-0x18(%rbp) 1cae: xor %eax,%eax 1cb0: lea -0x20(%rbp),%rax 1cb4: mov %rax,%rdi 1cb7: call 16e6 <_Z6callerv> 1cbc: lea 0x137d(%rip),%rax ; return address调用
caller()后状态如下所示:┌─────────────────────────────────────────┐ ← High Address │ main() │ ├─────────────────────────────────────────┤ │ caller() constructor │ │ - return addr: 0x1cbc (main) │ ← pushed by call at 0x1cb7 └─────────────────────────────────────────┘ ← Low Address (rsp) Heap State: - caller frame (__callerFrame) has not been constructed yet在
16e6开始的接下来一段汇编中,会做几件事:- 分配coroutine frame所需要的内存
- 创建
promise - 调用
promise.get_return_object() - 第一次调用
caller协程的状态机函数
00000000000016e6 <_Z6callerv>: 16e6: endbr64 16ea: push %rbp 16eb: mov %rsp,%rbp 16ee: push %rbx 16ef: sub $0x38,%rsp 16f3: mov %rdi,-0x38(%rbp) 16f7: mov %fs:0x28,%rax 1700: mov %rax,-0x18(%rbp) 1704: xor %eax,%eax 1706: movq $0x0,-0x20(%rbp) 170e: movb $0x0,-0x21(%rbp) 1712: movb $0x0,-0x22(%rbp) 1716: mov $0x58,%eax ; 88 bytes for coroutine frame 171b: mov %rax,%rdi 171e: call 1150 <_Znwm@plt> ; operator new 1723: mov %rax,-0x20(%rbp) ; -0x20(%rbp) = caller_frame pointer 1727: mov -0x20(%rbp),%rax 172b: movb $0x1,0x32(%rax) 172f: mov -0x20(%rbp),%rax ; %rax = caller_frame pointer 1733: lea 0xfe(%rip),%rdx ; rdx = 1838 即caller的状态机函数地址 (resume_fn) 173a: mov %rdx,(%rax) 173d: mov -0x20(%rbp),%rax ; %rax = caller_frame pointer 1741: lea 0x519(%rip),%rdx ; rdx = 1c61 即caller的销毁函数地址 (destroy_fn) 1748: mov %rdx,0x8(%rax) 174c: mov -0x20(%rbp),%rax ; %rax = caller_frame pointer 1750: add $0x10,%rax ; %rax = &(caller_frame->promise) 1754: mov %rax,%rdi 1757: call 204c <...> ; 调用promise构造函数 175c: movb $0x1,-0x21(%rbp) 1760: mov -0x20(%rbp),%rax 1764: lea 0x10(%rax),%rdx ; rdx = &(caller_frame->promise) 1768: mov -0x38(%rbp),%rax ; %rax = 返回值地址 176c: mov %rdx,%rsi 176f: mov %rax,%rdi 1772: call 231a <> ; 调用promise.get_return_object() 1777: movb $0x1,-0x22(%rbp) 177b: mov -0x20(%rbp),%rax ; %rax = caller_frame pointer 177f: movw $0x0,0x30(%rax) ; caller_frame->suspend_index = 0 1785: mov -0x20(%rbp),%rax 1789: mov %rax,%rdi 178c: call 1838 <...> ; 第一次调用caller的状态机函数 1791: jmp 181a <...>调用状态机后的状态如下所示:
┌─────────────────────────────────────────┐ ← High Address │ main() │ ├─────────────────────────────────────────┤ │ caller() constructor │ │ - return addr: 0x1cbc (main) │ ← pushed by call at 0x1cb7 ├─────────────────────────────────────────┤ │ caller_resume │ │ - return addr: 0x1791 │ ← pushed by call at 0x178c └─────────────────────────────────────────┘ ← Low Address (rsp) Heap State: - caller frame (__callerFrame) - suspend_index = 0 -
caller协程的suspend_index初始值为0。由于initial_suspend是suspend_always,因此在co_await promise.initial_suspend时,await_ready返回false,代表会被挂起,而await_suspend返回void,代表无条件将控制流返回给调用方,且在返回之前suspend_index被设置为2。状态机函数返回后,依次执行返回地址
1791的代码,最终由返回到main函数。1791: jmp 181a ; ... 181a: mov -0x18(%rbp),%rax 181e: sub %fs:0x28,%rax 1827: je 182e 182e: mov -0x38(%rbp),%rax ; rax = &task (return value) 1832: mov -0x8(%rbp),%rbx 1836: leave 1837: ret ; return to main (0x1cbc)此时栈帧中只有
main:┌─────────────────────┐ ← High Address │ main() stack frame │ └─────────────────────┘ ← Low Address (rsp) Heap State: - caller frame (__callerFrame) - suspend_index = 2 -
之后在
main函数中通过coroutine_handle手动恢复caller,call指令的返回地址是1d10。; 省略main中部分代码... 1d04: lea -0x20(%rbp),%rax ; %rax = caller()的返回对象 即SimpleTask<int> ; 其中只有一个成员变量即caller协程的coroutine_handle 1d08: mov %rax,%rdi 1d0b: call 26a6 <...> ; 调用caller's coroutine_handle.resume() 1d10: lea 0x1349(%rip),%rax ; ...00000000000026a6 <_ZNKSt7__n486116coroutine_handleIN10SimpleTaskIiE12promise_typeEE6resumeEv>: 26a6: endbr64 26aa: push %rbp 26ab: mov %rsp,%rbp 26ae: sub $0x10,%rsp 26b2: mov %rdi,-0x8(%rbp) 26b6: mov -0x8(%rbp),%rax 26ba: mov (%rax),%rax ; %rax = calle_frame pointer 26bd: mov (%rax),%rdx ; %rdx = *(%rax) = caller->resume_fn = 1838 26c0: mov %rax,%rdi 26c3: call *%rdx ; 调用caller状态机函数 26c5: nop 26c6: leave 26c7: ret调用后的状态如下所示:
┌─────────────────────────────────────────┐ ← High Address │ main() │ ├─────────────────────────────────────────┤ │ coroutine_handle.resume() │ │ - return addr: 0x1d10 │ ← pushed by call at 0x1d0b ├─────────────────────────────────────────┤ │ caller_resume │ │ - return addr: 0x26c5 │ ← pushed by call at 0x26c3 └─────────────────────────────────────────┘ ← Low Address (rsp) Heap State: - caller frame (__callerFrame) - suspend_index = 2
caller → callee
-
caller协程继续执行,suspend_index为2,跳转到如下汇编继续执行:195b: mov -0x28(%rbp),%rax ; %rax = caller coroutine frame 195f: movb $0x1,0x33(%rax) ; 设置initial_await_called = 1 1963: mov -0x28(%rbp),%rax 1967: add $0x34,%rax ; %rax = &(caller_frame->initial_awaiter) 196b: mov %rax,%rdi 196e: call 1f22 <...> ; 调用initial_awaiter.await_resume(); 1973: lea 0x16a0(%rip),%rax ; 加载字符串 " > caller()\n" 197a: mov %rax,%rsi 197d: lea 0x36bc(%rip),%rax ; 加载 std::cout 1984: mov %rax,%rdi 1987: call 1140 <...> ; 输出字符串 -
co_await callee(),对应汇编如下,会通过call 12a9创建callee协程。198c: mov -0x28(%rbp),%rax 1990: add $0x48,%rax ; %rax = &(caller_frame->callee_task) 1994: mov %rax,%rdi 1997: call 12a9 <_Z6calleev> ; 调用callee()创建协程 199c: mov -0x28(%rbp),%rax 19a0: lea 0x48(%rax),%rdx ; %rdx = &(caller_frame->callee_task) 19a4: mov -0x28(%rbp),%rax 19a8: add $0x40,%rax ; %rax = &(caller_frame->callee_awaiter) 19ac: mov %rdx,%rsi 19af: mov %rax,%rdi 19b2: call 244c <...> ; 调用operator co_await() 19b7: mov -0x28(%rbp),%rax 19bb: add $0x40,%rax ; %rax = &(caller_frame->callee_awaiter) 19bf: mov %rax,%rdi 19c2: call 2550 <...> ; 调用callee_awaiter.await_ready() 19c7: xor $0x1,%eax 19ca: test %al,%al 19cc: je 1a0b <...> ; 如果await_ready返回true 跳转到状态4 -
由于
await_ready返回false,调用Awaiter::await_suspend对称转移至callee,即返回callee的coroutine_handle,将控制权交给callee。std::coroutine_handle<> await_suspend(std::coroutine_handle<> continuation) noexcept { handle_.promise().continuation_ = continuation; return handle_; }对应汇编如下,在
Awaiter::await_suspend中,会把caller的coroutine_handle保存到callee的promise中。19ce: mov -0x28(%rbp),%rax 19d2: movw $0x4,0x30(%rax) ; caller_frame->suspend_index = 4 19d8: mov -0x28(%rbp),%rax 19dc: lea 0x40(%rax),%rbx ; %rbx = &(caller_frame->callee_awaiter) 19e0: mov -0x28(%rbp),%rax 19e4: add $0x28,%rax ; %rax = caller的coroutine_handle(当前协程句柄) 19e8: mov %rax,%rdi 19eb: call 2132 <...> ; 转换为coroutine_handle<void> 19f0: mov %rax,%rsi 19f3: mov %rbx,%rdi 19f6: call 2564 <...> ; 调用callee_awaiter.await_suspend() 19fb: mov %rax,-0x20(%rbp) ; %rax = 对称转移返回的协程句柄 (即callee的coroutine_handle) 19ff: jmp 1b66 <...> ; 准备跳转到callee 1a04: mov $0x0,%ebx 1a09: jmp 1a27 <...>跳转前的状态如下所示,注意
19d2处已经把suspend_index改为4:Before symmetric transfer (caller -> callee) ┌─────────────────────────────────────────┐ ← High Address │ main() │ ├─────────────────────────────────────────┤ │ coroutine_handle.resume() │ │ - return addr: 0x1d10 │ ← pushed by call at 0x1d0b ├─────────────────────────────────────────┤ │ caller_resume │ │ - return addr: 0x26c5 │ ← pushed by call at 0x26c3 └─────────────────────────────────────────┘ ← Low Address (rsp) Heap State: - caller frame (__callerFrame) - suspend_index = 4具体跳转到
callee的汇编代码如下。注意在19fb时已经把callee的coroutine_handle保存在-0x20(%rbp)了,然后通过coroutine_handle::address()获取到callee的coroutine frame地址,即callee的状态机函数callee_resume的入口地址,并保存到%rdx中,最终通过call *%rdx跳转至13fb。1b66: endbr64 1b6a: lea -0x20(%rbp),%rax ; rax = &(callee's coroutine_handle) 1b6e: mov %rax,%rdi 1b71: call 1dd4 <...address> ; 调用coroutine_handle::address ; %rax = callee_frame pointer 1b76: mov (%rax),%rdx ; rdx = *(callee_frame) = callee's resume_fn函数地址 即状态机函数 1b79: mov %rax,%rdi ; rdi = callee_frame pointer 1b7c: call *%rdx ; ★ indirect tail call调用callee的状态机函数 ★ 1b7e: jmp 1c46 <cleanup>1b66开始的这段汇编,是编译器对caller协程生成的一段对称转移通用指令,后面还会再见到一次,只不过根据await_suspend的返回值不同,最终跳转的位置也不同。跳转后的状态如下所示,注意
caller此时处于被挂起状态,而callee的coroutine frame还没有创建。After symmetric transfer (caller -> callee) ┌─────────────────────────────────────────┐ ← High Address │ main() │ ├─────────────────────────────────────────┤ │ coroutine_handle.resume() │ │ - return addr: 0x1d10 │ ← pushed by call at 0x1d0b ├─────────────────────────────────────────┤ │ caller_resume │ │ - return addr: 0x26c5 │ ← pushed by call at 0x26c3 ├─────────────────────────────────────────┤ │ callee_resume (not started) │ │ - symmetric transferred from 0x1b7c │ │ - return addr: 0x1b7e │ └─────────────────────────────────────────┘ ← Low Address (rsp) Heap State: - caller frame (__callerFrame) - suspend_index = 4 - suspened - callee frame (__calleeFrame) has not been constructed yet需要注意的是,
call *%rdx所跳转的函数,是callee的状态机函数,它也会通过对称转移,使控制流切换到其他协程上。但是在执行call *%rdx时,下一条指令地址1b7e的确会被压栈,然后跳转到*%rdx处,只不过其返回地址1b7e对应的代码并像普通函数调用返回后立马执行,而可能是会被tail call优化,绕一个大圈回来。
callee → caller
-
创建
callee,这一步和之前一样,分配coroutine frame,构造promise,调用promise.get_return_object()。SimpleTask<int> callee() { std::cout << " > callee()\n"; co_return 42; }经过
co_await initial_suspend和函数体,通过promise_type的return_value接口保存了返回值42。并且此时callee协程已经执行完成,会将其状态机函数置为nullptr,后续不能再被调用。(但coroutine frame还没有释放,释放时机下面会讲)1543: call 20c4 <...> ; 调用promise.return_value 1548: nop 1549: mov -0x28(%rbp),%rax ; rax = callee_frame pointer 154d: movq $0x0,(%rax) ; callee_frame->resume_fn = nullptr ; 即标识callee协程已完成 状态机函数后续不能再被调用最终进入到
co_await final_suspend阶段。FinalAwaiter的await_ready返回false,于是在await_suspend处再次对称转移。注意caller的coroutine_handle已经在前面被保存在了callee的promise中,FinalAwaiter::await_suspend返回caller的coroutine_handle即可将控制权再交还给caller。std::coroutine_handle<> await_suspend(std::coroutine_handle<promise_type> h) noexcept { auto continuation = h.promise().continuation_; if (continuation) { return continuation; } return std::noop_coroutine(); }前面的汇编就不展开了,只详细看对称转移部分:
157b: endbr64 157f: mov -0x28(%rbp),%rax ; %rax = callee_frame pointer 1583: movw $0x4,0x30(%rax) ; callee_frame->suspend_index = 4 1589: mov -0x28(%rbp),%rax 158d: lea 0x35(%rax),%rdx ; %rdx = &(callee_frame->final_awaiter) 1591: mov -0x28(%rbp),%rax 1595: mov 0x28(%rax),%rax ; %rax = callee的coroutine_handle(当前协程句柄) 1599: mov %rax,%rsi 159c: mov %rdx,%rdi 159f: call 21e2 <...> ; 调用FinalAwaiter::await_suspend() 15a4: mov %rax,-0x20(%rbp) ; %rax = 对称转移返回的协程句柄(即caller的coroutine_handle) 15a8: lea -0x20(%rbp),%rax ; %rax = &(caller's coroutine_handle) 15ac: mov %rax,%rdi 15af: call 1dd4 <...address> ; 调用coroutine_handle::address ; %rax = caller_frame pointer 15b4: mov (%rax),%rdx ; %rdx = *(caller_frame) = caller's resume_fn函数地址 即状态机函数 15b7: mov %rax,%rdi ; %rdi = caller_frame pointer 15ba: call *%rdx ; ★ indirect tail call调用caller状态机函数 ★ 15bc: jmp 1698 <cleanup>原理和上面一次对称转移一样,都是获取
await_suspend的返回值,通过coroutine_handle::address()获取到返回值,即caller的coroutine frame地址,也就是caller的状态机函数caller_resume的入口地址,并保存到%rdx中,最终通过call *%rdx跳转至1838。跳转前后的状态如下所示:Before symmetric transfer (callee -> caller) ┌─────────────────────────────────────────┐ ← High Address │ main() │ ├─────────────────────────────────────────┤ │ coroutine_handle.resume() │ │ - return addr: 0x1d10 │ ← pushed by call at 0x1d0b ├─────────────────────────────────────────┤ │ caller_resume │ │ - return addr: 0x26c5 │ ← pushed by call at 0x26c3 ├─────────────────────────────────────────┤ │ callee_resume │ │ - symmetric transferred from 0x1b7c │ │ - return addr: 0x1b7e │ └─────────────────────────────────────────┘ ← Low Address (rsp) Heap State: - caller frame (__callerFrame) - suspend_index = 4 - suspended - callee frame (__calleeFrame) - suspend_index = 4 - resume_fn = nullptr After symmetric transfer (callee -> caller) ┌─────────────────────────────────────────┐ ← High Address │ main() │ ├─────────────────────────────────────────┤ │ coroutine_handle.resume() │ │ - return addr: 0x1d10 │ ← pushed by call at 0x1d0b ├─────────────────────────────────────────┤ │ caller_resume │ │ - return addr: 0x26c5 │ ← pushed by call at 0x26c3 ├─────────────────────────────────────────┤ │ callee_resume │ │ - symmetric transferred from 0x1b7c │ │ - return addr: 0x1b7e │ ├─────────────────────────────────────────┤ │ caller_resume │ │ - symmetric transferred from 0x15ba │ │ - return addr: 0x15bc │ └─────────────────────────────────────────┘ ← Low Address (rsp) Heap State: - caller frame (__callerFrame) - suspend_index = 4 - callee frame (__calleeFrame) - suspend_index = 4 - resume_fn = nullptr - suspended注意
caller的状态机函数被再次调用,因此又会对%rbp和%rsp进行相应操作,出现了一个新的栈帧。0000000000001838 <_Z6callerPZ6callervE16_Z6callerv.Frame.actor>: 1838: endbr64 183c: push %rbp 183d: mov %rsp,%rbp准确来说,
callee协程当然是被挂起的,而caller协程是正在执行的,只不过caller_resume这个函数由于被优化为了一系列tail call,导致在栈上出现了两次。 -
caller状态机会继续执行,此时suspend_index为4,跳转到如下代码。主要逻辑就是完成co_await callee()的善后,此时callee已经执行完成,析构了caller coroutine frame中的callee_awaiter和callee_task。1a0b: mov -0x28(%rbp),%rax ; %rax = caller_frame pointer 1a0f: add $0x40,%rax ; %rax = &(caller_frame->callee_awaiter) 1a13: mov %rax,%rdi 1a16: call 2630 <...> ; 调用caller_frame->callee_awaiter.await_resume() 1a1b: mov -0x28(%rbp),%rdx 1a1f: mov %eax,0x38(%rdx) ; 保存到caller_frame->result中 1a22: mov $0x1,%ebx 1a27: mov -0x28(%rbp),%rax ; %rax = caller_frame pointer 1a2b: add $0x40,%rax ; %rax = &(caller_frame->callee_awaiter) 1a2f: mov %rax,%rdi 1a32: call 24d4 <...> ; 调用callee_awaiter的析构函数 1a37: cmp $0x1,%ebx 1a3a: jne 1a43 <...> ; %ebx为1 不跳转 1a3c: mov $0x1,%ebx 1a41: jmp 1a48 <...> 1a43: mov $0x0,%ebx 1a48: mov -0x28(%rbp),%rax ; %rax = caller_frame pointer 1a4c: add $0x48,%rax ; %rax = &(caller_frame->callee_task) 1a50: mov %rax,%rdi 1a53: call 2352 <...> ; 调用callee_task的析构函数 1a58: cmp $0x1,%ebx 1a5b: jne 1b32 <...> ; %ebx为1 不跳转 1a61: nop注意在析构caller coroutine frame中的
callee_awaiter,也就是析构co_await callee()生成的Awaiter对象时,callee的coroutine frame会被释放。大致调用路径如下:1a32: call 24d4 ; 调用Awaiter::~Awaiter() ↓ 2544: call 2770 ; 调用coroutine_handle<SimpleTask<int>::promise_type>::destroy() ↓ 278e: call *%rdx ; callee.Frame.destroy (0x16b3) ↓ 16df: call 13fb ; callee.Frame.actor (最后一次调用状态机函数,清理) ↓ 释放callee的coroutine frame具体过程如下,不想深究的可以调到下一步骤。首先在
coroutine_handle<SimpleTask<int>::promise_type>::destroy()中,先根据coroutine_handle获取coroutine frame指针,再获取coroutine frame中的销毁函数指针,最后调用。0000000000002770 <_ZNKSt7__n486116coroutine_handleIN10SimpleTaskIiE12promise_typeEE7destroyEv>: 2770: endbr64 2774: push %rbp 2775: mov %rsp,%rbp 2778: sub $0x10,%rsp 277c: mov %rdi,-0x8(%rbp) 2780: mov -0x8(%rbp),%rax ; %rax = coroutine handle's pointer 2784: mov (%rax),%rax ; %rax = &(couroutine frame) ; 即读取coroutine_handle中的coroutine frame指针 ; 等同于调用coroutine_handle::address() 2787: mov 0x8(%rax),%rdx ; %rdx = &(frame->destory_fn) 278b: mov %rax,%rdi 278e: call *%rdx ; 调用destory_fn 对于callee来说是16b3 2790: nop 2791: leave 2792: ret之后,在销毁函数
callee(callee()::_Z6calleev.Frame*) [clone .destroy]中设置suspend_index的最低位为1,并最后一次调用状态机函数进行清理。00000000000016b3 <_Z6calleePZ6calleevE16_Z6calleev.Frame.destroy>: 16b3: endbr64 16b7: push %rbp 16b8: mov %rsp,%rbp 16bb: sub $0x10,%rsp 16bf: mov %rdi,-0x8(%rbp) 16c3: mov -0x8(%rbp),%rax 16c7: movzwl 0x30(%rax),%eax ; %rax = callee_frame->suspend_index 16cb: or $0x1,%eax ; 设置suspend_index的最低位为1 表示已销毁 16ce: mov %eax,%edx 16d0: mov -0x8(%rbp),%rax 16d4: mov %dx,0x30(%rax) ; callee_frame->suspend_index = 5 16d8: mov -0x8(%rbp),%rax 16dc: mov %rax,%rdi 16df: call 13fb <...> ; 最后一次调用状态机函数 16e4: leave 16e5: ret最后,在状态机函数中析构promise,并调用
operator delete释放内存:00000000000013fb <_Z6calleePZ6calleevE16_Z6calleev.Frame.actor>: ; ... 142b: mov -0x28(%rbp),%rax 142f: movzwl 0x30(%rax),%eax 1433: movzwl %ax,%eax 1436: cmp $0x5,%eax 1439: je 15c1 <> ; suspsend_index = 5则跳转 ; ... 15c1: jmp 15d6 <> ; ... 15d6: mov -0x28(%rbp),%rax 15da: add $0x10,%rax 15de: mov %rax,%rdi 15e1: call 208a <...> ; 调用promise的析构函数 15e6: mov -0x28(%rbp),%rax 15ea: movzbl 0x32(%rax),%eax 15ee: movzbl %al,%eax 15f1: test %eax,%eax 15f3: je 1698 <...> 15f9: mov -0x28(%rbp),%rax 15fd: mov %rax,%rdi 1600: call 1130 <_ZdlPv@plt> ; 调用operator delete释放内存 1605: jmp 1698 <...> ; ... 1698: nop 1699: mov -0x18(%rbp),%rax 169d: sub %fs:0x28,%rax 16a6: je 16ad 16a8: call 1170 <__stack_chk_fail@plt> 16ad: mov -0x8(%rbp),%rbx 16b1: leave 16b2: ret此时的栈状态如下所示,即callee的coroutine frame已经不存在了,但其状态机函数还存在于栈上。虽然coroutine frame已经不存在,那状态机函数还怎么执行呢?这里需要说明的是,callee的状态机函数剩余还未执行的部分,只是一些清理逻辑且会迅速返回,而不会再读取coroutine frame中的内容。
After callee coroutine frame destructed ┌─────────────────────────────────────────┐ ← High Address │ main() │ ├─────────────────────────────────────────┤ │ coroutine_handle.resume() │ │ - return addr: 0x1d10 │ ← pushed by call at 0x1d0b ├─────────────────────────────────────────┤ │ caller_resume │ │ - return addr: 0x26c5 │ ← pushed by call at 0x26c3 ├─────────────────────────────────────────┤ │ callee_resume │ │ - symmetric transferred from 0x1b7c │ │ - return addr: 0x1b7e │ ├─────────────────────────────────────────┤ │ caller_resume │ │ - symmetric transferred from 0x15ba │ │ - return addr: 0x15bc │ └─────────────────────────────────────────┘ ← Low Address (rsp) Heap State: - caller frame (__callerFrame) - suspend_index = 4 - callee_awaiter destructed - callee_task destructed -
之后
caller协程继续执行std::cout << " > caller: result = " << result << "\n";,略过相应汇编。最终caller协程返回result * 2,对应汇编如下1aa4: mov -0x28(%rbp),%rax ; %rax = caller_frame pointer 1aa8: add $0x10,%rax ; %rax = &(caller_frame->promise.value) 1aac: mov -0x28(%rbp),%rdx ; %rdx = caller_frame pointer 1ab0: mov 0x38(%rdx),%edx ; %rdx = caller_frame->result 1ab3: add %edx,%edx ; result * 2 1ab5: mov %edx,%esi 1ab7: mov %rax,%rdi 1aba: call 20c4 <...> ; calle_frame->promise.return_value() 1abf: nop
caller → main
-
之后,
caller协程将进入到co_await final_suspend阶段。1ac0: mov -0x28(%rbp),%rax ; %rax = caller_frame pointer 1ac4: movq $0x0,(%rax) ; caller_frame->resume_fn = nullptr ; 即标识caller协程已完成 状态机函数后续不能再被调用 1acb: mov -0x28(%rbp),%rax ; %rax = caller_frame pointer 1acf: add $0x10,%rax ; %rax = &(caller_frame->promise) 1ad3: mov %rax,%rdi 1ad6: call 21be <...> ; 调用SimpleTask<int>::promise_type::final_suspend() 1adb: mov -0x28(%rbp),%rax ; %rax = caller_frame pointer 1adf: add $0x50,%rax ; %rax = &(caller_frame->final_awaiter) 1ae3: mov %rax,%rdi 1ae6: call 21ce <...> ; 调用final_awaiter.await_ready() 返回值为false 1aeb: xor $0x1,%eax ; 取反后 %rax = 1 1aee: test %al,%al 1af0: je 1b1f <...> ; await_ready返回false 不会跳转 1af2: mov -0x28(%rbp),%rax ; %rax = caller_frame pointer 1af6: movw $0x6,0x30(%rax) ; caller_frame->suspend_index = 6 1afc: mov -0x28(%rbp),%rax ; %rax = caller_frame pointer 1b00: lea 0x50(%rax),%rdx ; %rax = &(caller_frame->final_awaiter) 1b04: mov -0x28(%rbp),%rax ; %rax = caller_frame pointer 1b08: mov 0x28(%rax),%rax ; %rax = caller's coroutine handle 1b0c: mov %rax,%rsi 1b0f: mov %rdx,%rdi 1b12: call 21e2 <...> ; 调用final_awaiter.await_suspend() 1b17: mov %rax,-0x20(%rbp) ; %rax = std::noop_coroutine 1b1b: jmp 1b66 <...>由于
caller协程并没有指定continuation,所以在final_awaiter.await_suspend()时会返回std::noop_coroutine。再次跳转到我们在第4步中提到处理对称转移的通用序列1b66处。 -
由于
std::noop_coroutine本质上就是一个dummy coroutine frame,根据提案中所述,std::noop_coroutine的address函数返回值非空,但其状态机函数什么都不会执行,于是直接跳转到caller状态机函数的收尾处。1b66: endbr64 1b6a: lea -0x20(%rbp),%rax ; %rax = std::noop_coroutine 1b6e: mov %rax,%rdi 1b71: call 1dd4 <...> ; 对noop_coroutine调用address() 会返回一个dummy coroutine frame 1b76: mov (%rax),%rdx ; %rdx = &(dummy coroutine's resume_fn) 1b79: mov %rax,%rdi 1b7c: call *%rdx ; 调用dummy coroutine的状态机函数 ; 本质上什么都不会执行 1b7e: jmp 1c46 <...> ; 跳转至1c46返回 -
最终在
caller状态机函数返回:; epilogue 1c46: nop 1c47: mov -0x18(%rbp),%rax 1c4b: sub %fs:0x28,%rax 1c54: je 1c5b <...> 1c56: call 1170 <__stack_chk_fail@plt> 1c5b: mov -0x8(%rbp),%rbx 1c5f: leave 1c60: retret后的状态为:┌─────────────────────────────────────────┐ ← High Address │ main() │ ├─────────────────────────────────────────┤ │ coroutine_handle.resume() │ │ - return addr: 0x1d10 │ ← pushed by call at 0x1d0b ├─────────────────────────────────────────┤ │ caller_resume │ │ - return addr: 0x26c5 │ ← pushed by call at 0x26c3 ├─────────────────────────────────────────┤ │ callee_resume │ │ - symmetric transferred from 0x1b7c │ │ - return addr: 0x1b7e │ ├─────────────────────────────────────────┤ │ caller_resume │ │ - symmetric transferred from 0x15ba │ │ - return addr: 0x15bc │ <- cpu is here └─────────────────────────────────────────┘ ← Low Address (rsp) Heap State: - caller frame (__callerFrame) - suspend_index = 4 - callee_awaiter destructed - callee_task destructed此时CPU下一条要执行指令是其返回地址指向的
15bc,很快又再次在16b2处ret。15bc: jmp 1698 <...> ; ... 1698: nop 1699: mov -0x18(%rbp),%rax 169d: sub %fs:0x28,%rax 16a6: je 16ad 16a8: call 1170 <__stack_chk_fail@plt> 16ad: mov -0x8(%rbp),%rbx 16b1: leave 16b2: retret后的状态为:┌─────────────────────────────────────────┐ ← High Address │ main() │ ├─────────────────────────────────────────┤ │ coroutine_handle.resume() │ │ - return addr: 0x1d10 │ ← pushed by call at 0x1d0b ├─────────────────────────────────────────┤ │ caller_resume │ │ - return addr: 0x26c5 │ ← pushed by call at 0x26c3 ├─────────────────────────────────────────┤ │ callee_resume │ │ - symmetric transferred from 0x1b7c │ │ - return addr: 0x1b7e │ <- cpu is here └─────────────────────────────────────────┘ ← Low Address (rsp) Heap State: - caller frame (__callerFrame) - suspend_index = 4 - callee_awaiter destructed - callee_task destructed此时CPU下一条要执行指令是其返回地址指向的
1b7e,这里又跳转到1c46处(代码上面出现过),会再次ret。1b7e: jmp 1c46 <...> ; 跳转至1c46返回ret后状态为:┌─────────────────────────────────────────┐ ← High Address │ main() │ ├─────────────────────────────────────────┤ │ coroutine_handle.resume() │ │ - return addr: 0x1d10 │ ← pushed by call at 0x1d0b ├─────────────────────────────────────────┤ │ caller_resume │ │ - return addr: 0x26c5 │ <- cpu is here └─────────────────────────────────────────┘ ← Low Address (rsp) Heap State: - caller frame (__callerFrame) - suspend_index = 4 - callee_awaiter destructed - callee_task destructed此时CPU下一条要执行指令是其返回地址指向的
26c5,再次ret。26c5: nop 26c6: leave 26c7: retret后状态为:┌─────────────────────────────────────────┐ ← High Address │ main() │ ├─────────────────────────────────────────┤ │ coroutine_handle.resume() │ │ - return addr: 0x1d10 │ <- cpu is here └─────────────────────────────────────────┘ ← Low Address (rsp) Heap State: - caller frame (__callerFrame) - suspend_index = 4 - callee_awaiter destructed - callee_task destructed此时
caller协程也执行完成,接下来会将caller的coroutine frame释放。大致调用路径如下:1d65: call 2352 ; 调用caller协程的返回值析构 SimpleTask::~SimpleTask() ↓ 23db: call 2770 ; 调用coroutine_handle<SimpleTask<int>::promise_type>::destroy() ↓ 278e: call *%rdx ; caller.Frame.destroy (0x1c61) ↓ 1c8d: call 1838 ; caller.Frame.actor (最后一次调用状态机函数,清理) ↓ 释放caller的coroutine frame执行完这一些列操作后,最终就回返回到
main了:1db4: mov -0x8(%rbp),%rbx 1db8: leave 1db9: ret
Asymmetric transfer vs Symmetric transfer
希望上面冗长的流程没有吓跑正在阅读的你,事实上我也花了将近一周的时间,才把短短100行左右的demo对应汇编大致分析了一遍。但不可否认的是,通过汇编,的确加深了我对协程整个执行流程的理解。最后我们总结下非对称转移和对称转移的核心。
在非对称转移中,每次coroutin_handle.resume()都是一个普通的函数调用。正如文章开头我们分析的,如果协程中又调用了其他协程的coroutin_handle.resume(),就会导致栈的深度线性增长,甚至出现stack overflow。
而对称转移中,编译器会生成如下所示的对称转移汇编。虽然形式上通过call *%rdx这样的indirect tail call,仍然会导致栈的深度加深,但是其返回地址,也就是call *%rdx的下一条指令,都会跳转到一段清理的逻辑中。
endbr64
lea -0x20(%rbp),%rax ; rax = &(coroutine_handle)
mov %rax,%rdi
call 1dd4 <...address> ; 调用coroutine_handle::address
; %rax = frame pointer
mov (%rax),%rdx ; rdx = *(frame pointer) = resume_fn函数地址 即状态机函数
mov %rax,%rdi ; rdi = frame pointer
call *%rdx ; indirect tail call调用对应协程的状态机函数
jmp 1c46 <cleanup>
然而,对称转移并不能完全解决栈深度线性增长的问题,比如A co_await B,B co_await C,C co_await D,一直这样下去,对称转移中的call *%rdx也会导致栈深度增长,并不能完全避免stack overflow。
但对称转移的优势在于,虽然栈确实会增长,但一旦协程执行完成,就能通过jmp cleanup并ret的形式快速清理,而不需要像非对称转移那样层层返回。
到这为止,关于协程的基础介绍应该告一段落,如果有下一篇的话,会研究下folly::coro::Task协程库。
Reference
| [C++ Coroutines: Understanding Symmetric Transfer | Asymmetric Transfer](https://lewissbaker.github.io/2020/05/11/understanding_symmetric_transfer) |