Deciphering C++ Coroutines, part 5
coroutine简化了异步代码的编写难度,但在debug时,却无法还原协程之间的异步调用链。这一篇我们研究下folly::AsyncStackFrame是如何记录协程之间的调用关系的。注意本文中所说的“协程“,如无特殊说明,都是指代folly::coro::Task。
Background
我们在上一篇其实有介绍,通过C++标准的协程底层机制,能够建立起协程之间的调用关系,从而实现一个完整的异步任务。比如在callee的promise对象中记录caller的coroutine_handle,进而使得callee在执行完成后,能够恢复caller继续执行。
第一种想法是:既然我们可以建立起caller和callee的调用关系,只要能获取到callee的coroutine_handle,也就能获取到其promise中的任意对象, 包括caller的coroutine_handle。也就能将两个coroutine_handle连接在一起,从而建立起协程的调用栈。
template<typename T>
struct TaskPromise {
std::coroutine_handle<void> continuation;
Try<T> result;
};
struct __coro_frame {
void (*resume_fn)(void*);
void (*destroy_fn)(void*);
std::__coroutine_traits_impl<ReturnType>::promise_type __promise;
int __suspend_index;
bool __initial_await_suspend_called;
// ...
};
然而,这个办法在当folly::coro::Task<T>中的T超过某个对齐大小的阈值之后,编译器就会在resume_fn和destroy_fn这两个指针之后,插入若干字节的padding。这时我们就无法再获取到协程帧中的promise对象以及其中的成员变量。
第二种想法是:获取到某个协程的coroutine_handle后,直接去查看其resume_fn的实现,进而推断出promise的位置,从而获取到其中的成员变量。然而这种方法要么是需要调试信息,同时不同编译器生成的底层汇编也不同,很难以统一形式处理。
第三种想法是:既然我们可以建立起caller和callee的调用关系,自然也就能在把协程之间的调用关系,以某种形式保存在协程的promise的任意成员变量中。和第一种的区别在于,它并不会直接尝试从coroutine_handle读取promise对象中的内容。事实上,folly的AsyncStackFrame就是作为一个成员变量,保存在协程的promise中。它和另一个类AsyncStackRoot一起,组成了一个链表,记录了协程的调用关系。通过遍历这个链表,也就能恢复出完整的调用栈。
在具体介绍原理之前,不妨看个例子:
void baz() {
// ...
}
folly::coro::Task<void> bar() {
co_return baz();
}
folly::coro::Task<void> foo() {
co_await bar();
}
int main() {
folly::CPUThreadPoolExecutor executor{1};
folly::coro::blockingWait(foo().scheduleOn(&executor));
return 0;
}
如果我们去gdb里面在baz函数加上断点,看到的调用栈可能是下面这样的:
#0 baz () at /home/doodle.wang/source/folly/folly/experimental/coro/test/BlockingWaitTest.cpp:375
#1 0x00005555557e067f in bar(_Z3barv.Frame *) (frame_ptr=0x7ffff0005210) at /home/doodle.wang/source/folly/folly/experimental/coro/test/BlockingWaitTest.cpp:378
#2 0x00005555557ecd8d in std::__n4861::coroutine_handle<void>::resume (this=0x7ffff6ff5ec8) at /usr/include/c++/13/coroutine:135
...
#5 0x0000555555813466 in folly::coro::TaskWithExecutor<void>::Awaiter::await_suspend<folly::coro::detail::BlockingWaitPromise<void> >(std::__n4861::coroutine_handle<folly::coro::detail::BlockingWaitPromise<void> >)::{lambda()#1}::operator()() (__closure=0x7ffff6ff60e0)
at /home/doodle.wang/source/folly/folly/experimental/coro/Task.h:526
...
#10 folly::ThreadPoolExecutor::runTask (this=0x555555b2b750, thread=..., task=...) at /home/doodle.wang/source/folly/folly/executors/ThreadPoolExecutor.cpp:100
#11 0x000055555585de53 in folly::CPUThreadPoolExecutor::threadRun (this=0x555555b2b750, thread=...)
at /home/doodle.wang/source/folly/folly/executors/CPUThreadPoolExecutor.cpp:326
...
#22 0x000055555588a0f8 in std::thread::_Invoker<std::tuple<folly::NamedThreadFactory::newThread(folly::Function<void ()>&&)::{lambda()#1}> >::operator()() (
this=0x7ffff00083a0) at /usr/include/c++/13/bits/std_thread.h:299
#23 0x0000555555880fa0 in std::thread::_State_impl<std::thread::_Invoker<std::tuple<folly::NamedThreadFactory::newThread(folly::Function<void ()>&&)::{lambda()#1}> > >::_M_run() (this=0x7ffff0008390) at /usr/include/c++/13/bits/std_thread.h:244
...
注意到foo是没有出现在调用栈中的。虽然是main调用了foo,但foo是被调度在一个Executor上的执行的,因此只能看到执行foo的Executor的相关调用栈。我们更想要的是一个完整的调用栈,而不区分是不是协程:
- baz
- bar
- foo
- main
我们不妨分析下AsyncStackFrame要还原出完整调用栈会遇到哪些情况,即包括:
- 普通函数调用普通函数
- 普通函数调用协程
- 协程调用协程
- 协程调用普通函数
普通函数调用普通函数是通过对%rbp和caller的返回地址的压栈出栈操作完成的,大致原理在上一篇我们介绍过,不熟悉的可以回顾下。而协程调用普通函数和普通函数调用普通函数本质上没有什么区别,因此这两种情况都不再赘述。
实际上,
folly::AsyncStackFrame不仅仅是支持协程,也支持追踪folly::Future这样的回调形式的异步调用栈,但鉴于我们这一系列都是分析协程,所以也都以协程为例。剩下篇幅中普通调用栈和同步栈是同义词,异步调用栈和协程调用栈是同义词。
AsyncStackFrame
普通函数的调用关系,是通过%rbp和返回地址串联起来,最终形成了普通调用栈,也称为同步栈。同理,为了还原协程之间的调度栈,我们需要记录下来caller被挂起在什么位置,以便callee执行完成之后恢复caller继续执行,本质上和同步栈是一样的。有了这些返回地址后,加上二进制的调试信息,就能把指令地址映射回对应的函数名,最终定位到源代码的文件和行号。
为了实现这个目标,有两个核心问题需要解决:
-
callee协程如何获知caller协程的返回地址,并保存在AsyncStackFrame中 - 如何将
caller和callee的AsyncStackFrame串联起来
这里直接展示下AsyncStackFrame的数据结构:
struct AsyncStackFrame {
AsyncStackFrame* parentFrame = nullptr;
void* instructionPointer = nullptr;
AsyncStackRoot* stackRoot = nullptr;
};
三个成员变量主要用于保存以下信息:
-
parentFrame:AsyncStackFrame单链表,在协程被挂起时会更新,记录当前协程是从被哪个协程被调用的,形成异步调用链。 -
instructionPointer:在协程被挂起时会更新,记录当前协程下次恢复时要执行的代码地址 -
stackRoot:记录当前协程属于哪个EventLoop(也可以理解为异步操作),只有正在执行的协程中stackRoot才非空。主要作用是连接普通调用栈和异步调用栈。
然后,我们分为协程调用协程和普通函数调用协程两种情况,分别介绍其具体原理。
Obtaining the return-address of an async-stack frame
对于第一个问题”callee协程如何获知caller协程的返回地址”,理论上只要我们能获取到某个协程帧,就能根据其中的suspend_index,得知当前协程挂起在哪个位置。即当协程恢复时,状态机函数resume_fn要从哪个地址开始继续执行。这块内容前期篇介绍过,不再赘述。
struct __coro_frame {
void (*resume_fn)(void*);
void (*destroy_fn)(void*);
std::__coroutine_traits_impl<ReturnType>::promise_type __promise;
int __suspend_index;
bool __initial_await_suspend_called;
// ...
};
然而,编译器可能会根据协程内部co_await数量的多少,会把状态机函数中根据suspend_index进行跳转的汇编代码处理成不同的形式:
- 对于比较小的协程,会直接通过
cmp指令比较suspend_index - 而比较大的协程,则会直接使用jump table进行跳转(本质上就是通过jump table优化
switch语句性能)
而不同编译器处理的方式差别更大,故而这种方式虽然可行,但是过于复杂。
而AsyncStackFrame的处理方式非常简单:我们之前介绍对称转移的时候说过,在Awaitable的await_suspend方法中可以建立起caller协程和callee协程的调用关系,并且可以将caller的相关信息传递给callee。那么,只要能以某种获取到caller协程的的返回地址(也就是caller调用co_await callee()的下一条指令地址),也就能传递给callee,达成建立协程调用栈的目的。
而具体获取到返回地址的方式就是编译器的内置函数__builtin_return_address,他可以传入一个整数n,从而获取第n个stack frame的返回地址。因此caller的返回地址可以通过如下形式进行传递:
template<typename T>
auto Task::Awaiter::await_suspend(std::coroutine_handle<> continuation) {
coro_.promise().getAsyncFrame().instructionPointer = __builtin_return_address(0);
// ...
return coro_;
}
PS:如果
await_suspend被inline了,那么__builtin_return_address就会获取到错误的返回地址,因此一般需要禁止inline这个函数。
Hooking up the stack-frames in a chain
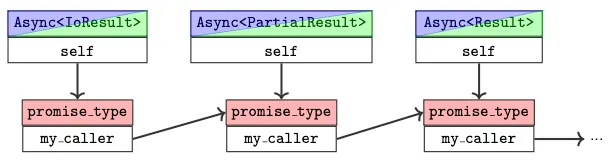
至于如何”将caller和callee的AsyncStackFrame串联起来”,我们可以如法炮制。也在Awaiter::await_suspend中更新callee的parentFrame指针。通过这样的形式,形成了一个到callee -> caller -> ...的链表,当我们通过打断点等类似手段,发现CPU正在执行任何一个协程时,就能沿着这个链表,恢复整个协程之间的调用关系。
具体形式如下:
template<typename Promise>
auto Task<T>::Awaiter::await_suspend(std::coroutine_handle<Promise> continuation) {
auto& callerFrame = continuation.promise().getAsyncFrame();
auto& calleeFrame = coro_.promise().getAsyncFrame();
calleeFrame.parentFrame = &callerFrame;
calleeFrame.instructionPointer = __builtin_return_address(0);
// ...
return coro_;
}
Finding the top async stack-frame
前面两步中,我们在Awaitable的await_suspend中,更新了parentFrame和instructionPointer两个字段,从而建立起了协程之间的调用关系。但此处还遗留了一个问题:如何获取到当前正在执行的协程的AsyncStackFrame。
对于普通函数的stack frame不存在这个问题,只需要读取
%rbp就知道topmost frame。
具体解决办法如下:在folly::coro::Task对称转移部分代码中,我们知道要将控制流交给哪个协程,自然也能把正在执行的协程的这个信息记录下来。只不过,考虑到我们不会直接读取promise中的AsyncStackFrame,因此是不直接存在其中的。实际的做法是,将当前正在执行的协程的AsyncStackFrame,保存在一个thread_local变量中,它的类型是AsyncStackRoot。数据结构如下:
struct AsyncStackRoot {
// Pointer to the currently-active AsyncStackFrame for this event
// loop or callback invocation. May be null if this event loop is
// not currently executing any async operations.
std::atomic<AsyncStackFrame*> topFrame{nullptr};
// Pointer to the next event loop context lower on the current
// thread's stack.
AsyncStackRoot* nextRoot = nullptr;
// Pointer to the stack-frame and return-address of the function
// call that registered this AsyncStackRoot on the current thread.
// This is generally the stack-frame responsible for executing async
// callbacks (typically an event-loop).
void* stackFramePtr = nullptr;
void* returnAddress = nullptr;
};
-
topFrame:指向当前正在执行的协程AsyncStackFrame。 -
nextRoot:用于串联多个EventLoop,从而形成AsyncStackRoot的链表,即EventLoop A创建了EventLoop B,则B的AsyncStackRoot的nextRoot指向A的AsyncStackRoot。 -
stackFramePtr&returnAddress:都用于记录普通调用栈的信息。stackFramePtr记录注册这个AsyncStackRoot时的同步栈帧(即当时的%rbp),returnAddress用于记录对应返回地址。
对于正在执行的协程,AsyncStackRoot中的topFrame和AsyncStackFrame中的stackRoot互相指向对方:
-
AsyncStackRoot中的topFrame指向当前正在执行的协程 -
AsyncStackFrame中的stackRoot指向当前线程正在使用的AsyncStackRoot
而对于被挂起的协程,AsyncStackFrame中的stackRoot为空指针。
下面通过一个具体例子具体介绍AsyncStackRoot的作用:
void compute_something() {
// ...
}
folly::coro::Task<void> coro1() {
compute_something();
co_return;
}
void func1() {
folly::coro::blockingWait(coro1());
}
folly::coro::Task<void> coro2() {
func1();
co_return;
}
void main() {
folly::coro::blockingWait(coro2());
}
和文章一开始的例子不同的是,这个例子并没有指定协程在哪个Executor上执行。main启动了嵌套的两个协程coro2和coro1,两个协程实际上是在同一个线程上执行的。每次folly::coro::blockingWait时,都会创建一个事件循环,不断推动异步任务执行直至完成。
FOLLY_NOINLINE T getVia(folly::DrivableExecutor *executor,
folly::AsyncStackFrame &parentFrame) && {
folly::Try<detail::lift_lvalue_reference_t<T>> result;
auto &promise = coro_.promise();
promise.setTry(&result);
// ...
executor->add([coro = coro_, rctx = RequestContext::saveContext()]() mutable {
RequestContextScopeGuard guard{std::move(rctx)};
folly::resumeCoroutineWithNewAsyncStackRoot(coro);
});
while (!promise.done()) { // <- EventLoop
executor->drive();
}
return std::move(result).value();
}
每个线程可能会启动多个EventLoop,每个EventLoop负责推动多个协程执行,在一个线程上,同一时刻只有一个协程正在执行,其余协程都处于挂起状态。为了得到正在执行的协程的AsyncStackFrame,我们需要将当前线程正在通过哪个EventLoop执行哪个协程以某种形式记录下来。
具体的办法是:每当启动一个EventLoop,就会创建一个AsyncStackRoot。在协程切换时,也就是caller执行co_await callee,以及callee执行co_await promise.final_suspend时,把当前线程正在执行的协程信息保存到AsyncStackRoot中。示意代码如下:
// caller -> callee
template <typename T>
auto Task<T>::Awaiter::await_suspend_impl(std::coroutine_handle<> continuation,
AsyncStackFrame &callerFrame) {
auto &calleeFrame = coro_.promise().getAsyncFrame();
calleeFrame.parentFrame = &callerFrame;
calleeFrame.instructionPointer = __builtin_return_address(0);
auto *stackRoot = callerFrame.stackRoot;
stackRoot->topFrame = &calleeFrame;
calleeFrame.stackRoot = stackRoot;
callerFrame.stackRoot = nullptr;
// ...
return coro_;
}
// calee -> caller
template <typename T>
auto TaskPromise<T>::FinalAwaiter::await_suspend(std::coroutine_handle<Promise> h) noexcept {
auto &promise = h.promise();
AsyncStackFrame &calleeFrame = promise.getAsyncFrame();
AsyncStackFrame *callerFrame = calleeFrame.parentFrame;
AsyncStackRoot *stackRoot = calleeFrame.stackRoot;
stackRoot->topFrame = callerFrame;
callerFrame->stackRoot = stackRoot;
callee->stackRoot = nullptr;
// ...
return promise.continuation;
}
可以看到,无论是在caller -> callee还是callee -> caller的对称转移处理过程中,都会:
- 将
AsyncStackRoot中的topFrame指向即将正在执行的协程 - 将即将执行的协程的
AsyncStackFrame中stackRoot置为非空,即将被挂起的协程的AsyncStackFrame中stackRoot置为空指针。
到这里我们还剩一个问题没有解释:一个线程可能有多个AsyncStackRoot,给定一个线程,如何获取到正在运行的AsyncStackRoot呢?答案就是将每个线程正在使用的AsyncStackRoot保存到thread local storage中。从宏观上看,AsyncStackFrame和AsyncStackRoot的完整关系如下:
// Stack Register
// |
// V
// Stack Frame currentStackRoot (TLS)
// | |
// V V
// Stack Frame <----- AsyncStackRoot -----> AsyncStackFrame -----> AsyncStackFrame -> ...
// | (stackFramePtr) | (topFrame) (parentFrame)
// V |
// Stack Frame |(nextRoot)
// : |
// V V
// Stack Frame <----- AsyncStackRoot -----> AsyncStackFrame -----> AsyncStackFrame -> ...
// | (stackFramePtr) | (topFrame) (parentFrame)
// V X
// Stack Frame
// :
// V
-
AsyncStackFrame和AsyncStackFrame之间通过parentFrame连接起来 -
AsyncStackRoot通过topFrame保存当前正在执行的协程 -
AsyncStackRoot和AsyncStackRoot之间则通过nextRoot连接起来,即EventLoop A创建了EventLoop B,则B的AsyncStackRoot的nextRoot指向A的AsyncStackRoot - 当前线程正在使用的
AsyncStackRoot,则保存到TLS中
延伸的问题是,在进程外(比如gdb中),如何线程找到对应的
AsyncStackRoot?通常来说,每个线程的control-block中会保存线程号、进程号、优先级以及我们所关心的TLS等,control-block的指针则会保存在fs寄存器中。在gdb中,可以根据该寄存器,找到线程对应的TLS,也就能找到对应的AsyncStackRoot。相关代码可以参考folly中的AsyncStackRootHolder。
Finding the stack-frame that corresponds to an async-frame activation
到这我们已经完全了解了协程之间的调用栈是如何组织的。最后一个问题就是如何处理普通函数调用协程,即如何把普通调用栈和协程调用栈连在一起,答案就是前面提到的stackFramePtr指针。仍以文章开头的代码为例:
void baz() {
// ...
}
folly::coro::Task<void> bar() {
co_return baz();
}
folly::coro::Task<void> foo() {
co_await bar();
}
int main() {
folly::CPUThreadPoolExecutor executor{1};
folly::coro::blockingWait(foo().scheduleOn(&executor));
return 0;
}
沿着协程的AsyncStackFrame调用栈,我们可以获取到如下的调用栈:
- baz
- bar
- foo
而我们期望的完整调用栈是:
- baz
- bar
- foo
- main
即,如果在某个线程中,通过coroutine_handle恢复了一个协程后,需要将此处的普通调用栈和协程调用栈连在一起。也就是把普通调用栈的相关信息,保存到AsyncStackRoot中的stackFramePtr和returnAddress字段中。每当一个线程创建一个EventLoop,即异步操作时,就会通过AsyncStackRoot记录下普通调用栈中的栈帧位置,以便后续从协程调用栈再切换回普通调用栈。代码的调用关系如下:
blockingWait
-> BlockingWaitTask::get or BlockingWaitTask::getVia
-> resumeCoroutineWithNewAsyncStackRoot
实际工作是由ScopedAsyncStackRoot这个类以RAII的形式设置和恢复的:
- 创建一个
AsyncStackRoot:- 其
stackFramePtr字段指向普通调用栈的地址,即FOLLY_ASYNC_STACK_FRAME_POINTER,实际是调用__builtin_frame_address。之后就能通过这个指针,在恢复完整调用栈时,从协程调用栈再切换回普通调用栈。(参照后续说明) - 其
returnAddress字段指向普通调用栈的下一条指令地址 - 更新TLS中的
AsyncStackRoot为调用blockingWait线程的AsyncStackRoot
- 其
- 更新
AsyncStackRoot中的topFrame为要恢复协程的AsyncStackFrame - 恢复协程执行
- 协程执行完成,将TLS中的
AsyncStackRoot还原为调用blockingWait线程的AsyncStackRoot
FOLLY_NOINLINE void resumeCoroutineWithNewAsyncStackRoot(
coro::coroutine_handle<> h, folly::AsyncStackFrame& frame) noexcept {
// In ScopedAsyncStackRoot's constructor, it will:
// 1. create a AsyncStackRoot with
// stackFramePtr = FOLLY_ASYNC_STACK_FRAME_POINTER()
// returnAddress = FOLLY_ASYNC_STACK_RETURN_ADDRESS()
// 2. update TLS AsyncStackRoot as current AsyncStackRoot
detail::ScopedAsyncStackRoot root;
root.activateFrame(frame);
h.resume();
// In ScopedAsyncStackRoot's destructor, it will:
// 1. restore TLS AsyncStackRoot to nextRoot of current AsyncStackRoot's
}
ScopedAsyncStackRoot::ScopedAsyncStackRoot(
void* framePointer = FOLLY_ASYNC_STACK_FRAME_POINTER(),
void* returnAddress = FOLLY_ASYNC_STACK_RETURN_ADDRESS()) noexcept {
root_.setStackFrameContext(framePointer, returnAddress);
root_.nextRoot = currentThreadAsyncStackRoot.get();
currentThreadAsyncStackRoot.set(&root_); // update thread local AsyncStackRoot
}
ScopedAsyncStackRoot::~ScopedAsyncStackRoot() {
assert(currentThreadAsyncStackRoot.get() == &root_);
assert(root_.topFrame.load(std::memory_order_relaxed) == nullptr);
currentThreadAsyncStackRoot.set_relaxed(root_.nextRoot);
}
inline void AsyncStackRoot::setStackFrameContext(
void* framePtr, void* ip) noexcept {
stackFramePtr = framePtr;
returnAddress = ip;
}
有了普通调用栈的返回地址后,我们就可以把普通调用栈和协程调用栈连接在一起。准确来说,所有folly::coro::Task暴露的接口,最终都会调用blockingWait。因此无论怎么使用folly::coro::Task,普通函数调用协程都会被保存下来。
我们结合这个链表梳理一遍还原整个调用栈的过程:
Stack Register
|
V
Stack Frame currentStackRoot (TLS)
| |
V V
Stack Frame <----- AsyncStackRoot -----> AsyncStackFrame -----> AsyncStackFrame -> ...
| (stackFramePtr) | (topFrame) (parentFrame)
V |
Stack Frame |(nextRoot)
: |
V V
Stack Frame <----- AsyncStackRoot -----> AsyncStackFrame -----> AsyncStackFrame -> ...
| (stackFramePtr) | (topFrame) (parentFrame)
V X
Stack Frame
:
V
- 读取TLS中的
AsyncStackRoot。 - 处理普通函数调用:沿着
%rbp和返回地址,恢复同步调用栈。直到发现当前stack frame的%rbp和当前AsyncStackRoot的stackFramePtr指向同一个位置(说明在这里启动了一个异步操作),不再沿着%rbp遍历。这里就是普通调用栈和协程调用栈切换的地方。 - 通过
AsyncStackRoot的topFrame找到正在执行的协程对应的AsyncStackFrame,并不断沿着parentFrame延伸协程调用栈。 - 直至某个
AsyncStackFrame的parentFrame为空,说明当前AsyncStackRoot的整条调用链已经遍历完成。 - 此时会根据
AsyncStackRoot的stackFramePtr切换到普通调用栈。 - 之后就又从第2步开始重复上述流程。
所以恢复出来的调用栈可能是交替出现的:同步栈 -> 异步栈 -> 同步栈 -> 异步栈 -> ...。
PS:也就是说,
AsyncStackRoot中的topFrame用于解决从同步调用栈切换到异步调用栈,而stackFramePtr用于解决从异步调用栈切换到同步调用栈。
在下面图中的序号代表在最终还原出来的调用栈中的序号:
Stack Register
|
V
Stack Frame(0) currentStackRoot (TLS)
| |
V V
Stack Frame(3) <- AsyncStackRoot -> AsyncStackFrame(1) -> AsyncStackFrame(2) -> X
| |
V |
Stack Frame(4) |
: |
V V
Stack Frame(7) <- AsyncStackRoot -> AsyncStackFrame(5) -> AsyncStackFrame(6) -> X
| |
V X
Stack Frame(8)
:
V
Example
到这AsyncStackFrame的核心逻辑都介绍完了,folly把恢复异步调用栈都封装到了这个gdb脚本中。
void baz() {
// ...
}
folly::coro::Task<void> bar() {
co_return baz();
}
folly::coro::Task<void> foo() {
co_await bar();
}
int main() {
folly::CPUThreadPoolExecutor executor{1};
folly::coro::blockingWait(foo().scheduleOn(&executor));
return 0;
}
对于上面的例子,如果在baz处打上断点,输入co_bt就能得到如下的调用栈:
>>> co_bt
#0 0x00005555557dfa61 in baz() () at /home/doodle.wang/source/folly/folly/experimental/coro/test/BlockingWaitTest.cpp:376
#1 0x00005555557dfcdf in bar(bar()::_Z3barv.Frame*) [clone .actor] () at /home/doodle.wang/source/folly/folly/experimental/coro/test/BlockingWaitTest.cpp:379
#2 0x00005555557e0232 in foo(foo()::_Z3foov.Frame*) [clone .actor] () at /home/doodle.wang/source/folly/folly/experimental/coro/test/BlockingWaitTest.cpp:382
#3 0x00005555557ec3fb in std::__n4861::coroutine_handle<void>::resume() const () at /usr/include/c++/13/coroutine:135
#4 0x00005555557e00fa in foo(foo()::_Z3foov.Frame*) [clone .actor] () at /home/doodle.wang/source/folly/folly/experimental/coro/test/BlockingWaitTest.cpp:383
...
#7 0x00005555557e03dc in main () at /home/doodle.wang/source/folly/folly/experimental/coro/test/BlockingWaitTest.cpp:388
#8 0x00007ffff782a1ca in ??? () at ???:0
#9 0x00007ffff782a28b in __libc_start_main () at ???:0
#10 0x00005555557da2f5 in _start () at ???:0
完结!